Ciencias humanas, sociales y económicas - Universidad de San ...
Ciencias humanas, sociales y económicas - Universidad de San ...
Ciencias humanas, sociales y económicas - Universidad de San ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
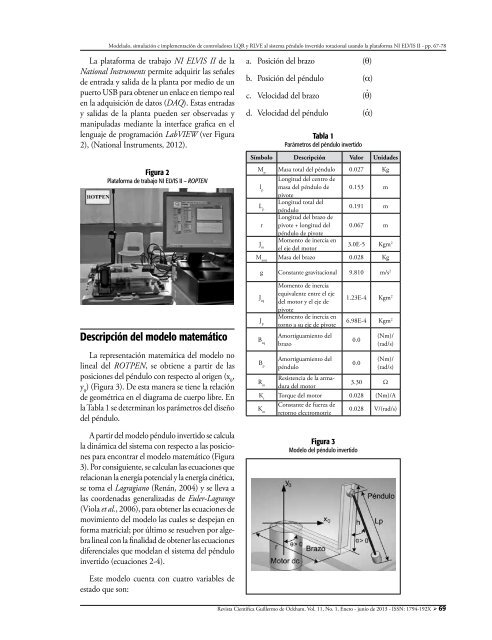
Mo<strong>de</strong>lado, simulación e implementación <strong>de</strong> controladores LQR y RLVE al sistema péndulo invertido rotacional usando la plataforma NI ELVIS II - pp. 67-78La plataforma <strong>de</strong> trabajo NI ELVIS II <strong>de</strong> laNational Instruments permite adquirir las señales<strong>de</strong> entrada y salida <strong>de</strong> la planta por medio <strong>de</strong> unpuerto USB para obtener un enlace en tiempo realen la adquisición <strong>de</strong> datos (DAQ). Estas entradasy salidas <strong>de</strong> la planta pue<strong>de</strong>n ser observadas ymanipuladas mediante la interface grafica en ellenguaje <strong>de</strong> programación LabVIEW (ver Figura2), (National Instruments, 2012).Figura 2Plataforma <strong>de</strong> trabajo NI ELVIS II – ROPTENa. Posición <strong>de</strong>l brazo (θ)b. Posición <strong>de</strong>l péndulo (α).c. Velocidad <strong>de</strong>l brazo (θ).d. Velocidad <strong>de</strong>l péndulo (α)Tabla 1Parámetros <strong>de</strong>l péndulo invertidoSímbolo Descripción Valor Unida<strong>de</strong>sM pMasa total <strong>de</strong>l péndulo 0.027 Kgl pLongitud <strong>de</strong>l centro <strong>de</strong>masa <strong>de</strong>l péndulo <strong>de</strong> 0.153 mpivoteL pLongitud total <strong>de</strong>lpéndulo0.191 mrLongitud <strong>de</strong>l brazo <strong>de</strong>pivote + longitud <strong>de</strong>l 0.067 mpéndulo <strong>de</strong> pivoteJ mMomento <strong>de</strong> inercia enel eje <strong>de</strong>l motor3.0E-5 Kgm 2M armMasa <strong>de</strong>l brazo 0.028 Kgg Constante gravitacional 9.810 m/s 2Descripción <strong>de</strong>l mo<strong>de</strong>lo matemáticoLa representación matemática <strong>de</strong>l mo<strong>de</strong>lo nolineal <strong>de</strong>l ROTPEN, se obtiene a partir <strong>de</strong> lasposiciones <strong>de</strong>l péndulo con respecto al origen (x 0,y 0) (Figura 3). De esta manera se tiene la relación<strong>de</strong> geométrica en el diagrama <strong>de</strong> cuerpo libre. Enla Tabla 1 se <strong>de</strong>terminan los parámetros <strong>de</strong>l diseño<strong>de</strong>l péndulo.A partir <strong>de</strong>l mo<strong>de</strong>lo péndulo invertido se calculala dinámica <strong>de</strong>l sistema con respecto a las posicionespara encontrar el mo<strong>de</strong>lo matemático (Figura3). Por consiguiente, se calculan las ecuaciones querelacionan la energía potencial y la energía cinética,se toma el Lagragiano (Renán, 2004) y se lleva alas coor<strong>de</strong>nadas generalizadas <strong>de</strong> Euler-Lagrange(Viola et al., 2006), para obtener las ecuaciones <strong>de</strong>movimiento <strong>de</strong>l mo<strong>de</strong>lo las cuales se <strong>de</strong>spejan enforma matricial; por último se resuelven por algebralineal con la finalidad <strong>de</strong> obtener las ecuacionesdiferenciales que mo<strong>de</strong>lan el sistema <strong>de</strong>l pénduloinvertido (ecuaciones 2-4).J eqJ pB eqB pR mMomento <strong>de</strong> inerciaequivalente entre el eje<strong>de</strong>l motor y el eje <strong>de</strong>pivoteMomento <strong>de</strong> inercia entorno a su eje <strong>de</strong> pivoteAmortiguamiento <strong>de</strong>lbrazoAmortiguamiento <strong>de</strong>lpénduloResistencia <strong>de</strong> la armadura<strong>de</strong>l motorFigura 3Mo<strong>de</strong>lo <strong>de</strong>l péndulo invertido1.23E-4 Kgm 26.98E-4 Kgm 20.00.0(Nm)/(rad/s)(Nm)/(rad/s)3.30 ΩK tTorque <strong>de</strong>l motor 0.028 (Nm)/AK mConstante <strong>de</strong> fuerza <strong>de</strong>retorno electromotriz0.028 V/(rad/s)Este mo<strong>de</strong>lo cuenta con cuatro variables <strong>de</strong>estado que son:Revista Científica Guillermo <strong>de</strong> Ockham. Vol. 11, No. 1. Enero - junio <strong>de</strong> 2013 - ISSN: 1794-192X ‣ 69