Ciencias humanas, sociales y económicas - Universidad de San ...
Ciencias humanas, sociales y económicas - Universidad de San ...
Ciencias humanas, sociales y económicas - Universidad de San ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
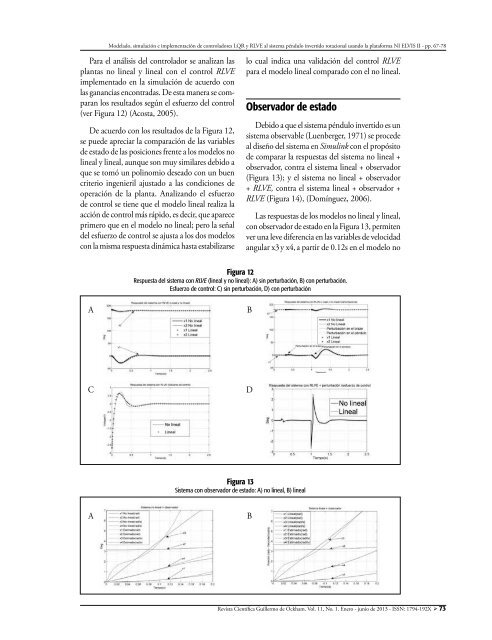
Mo<strong>de</strong>lado, simulación e implementación <strong>de</strong> controladores LQR y RLVE al sistema péndulo invertido rotacional usando la plataforma NI ELVIS II - pp. 67-78Para el análisis <strong>de</strong>l controlador se analizan lasplantas no lineal y lineal con el control RLVEimplementado en la simulación <strong>de</strong> acuerdo conlas ganancias encontradas. De esta manera se comparanlos resultados según el esfuerzo <strong>de</strong>l control(ver Figura 12) (Acosta, 2005).De acuerdo con los resultados <strong>de</strong> la Figura 12,se pue<strong>de</strong> apreciar la comparación <strong>de</strong> las variables<strong>de</strong> estado <strong>de</strong> las posiciones frente a los mo<strong>de</strong>los nolineal y lineal, aunque son muy similares <strong>de</strong>bido aque se tomó un polinomio <strong>de</strong>seado con un buencriterio ingenieril ajustado a las condiciones <strong>de</strong>operación <strong>de</strong> la planta. Analizando el esfuerzo<strong>de</strong> control se tiene que el mo<strong>de</strong>lo lineal realiza laacción <strong>de</strong> control más rápido, es <strong>de</strong>cir, que apareceprimero que en el mo<strong>de</strong>lo no lineal; pero la señal<strong>de</strong>l esfuerzo <strong>de</strong> control se ajusta a los dos mo<strong>de</strong>loscon la misma respuesta dinámica hasta estabilizarselo cual indica una validación <strong>de</strong>l control RLVEpara el mo<strong>de</strong>lo lineal comparado con el no lineal.Observador <strong>de</strong> estadoDebido a que el sistema péndulo invertido es unsistema observable (Luenberger, 1971) se proce<strong>de</strong>al diseño <strong>de</strong>l sistema en Simulink con el propósito<strong>de</strong> comparar la respuestas <strong>de</strong>l sistema no lineal +observador, contra el sistema lineal + observador(Figura 13); y el sistema no lineal + observador+ RLVE, contra el sistema lineal + observador +RLVE (Figura 14), (Domínguez, 2006).Las respuestas <strong>de</strong> los mo<strong>de</strong>los no lineal y lineal,con observador <strong>de</strong> estado en la Figura 13, permitenver una leve diferencia en las variables <strong>de</strong> velocidadangular x3 y x4, a partir <strong>de</strong> 0.12s en el mo<strong>de</strong>lo noFigura 12Respuesta <strong>de</strong>l sistema con RLVE (lineal y no lineal): A) sin perturbación, B) con perturbación.Esfuerzo <strong>de</strong> control: C) sin perturbación, D) con perturbaciónABCDFigura 13Sistema con observador <strong>de</strong> estado: A) no lineal, B) linealABRevista Científica Guillermo <strong>de</strong> Ockham. Vol. 11, No. 1. Enero - junio <strong>de</strong> 2013 - ISSN: 1794-192X ‣ 73