Ciencias humanas, sociales y económicas - Universidad de San ...
Ciencias humanas, sociales y económicas - Universidad de San ...
Ciencias humanas, sociales y económicas - Universidad de San ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
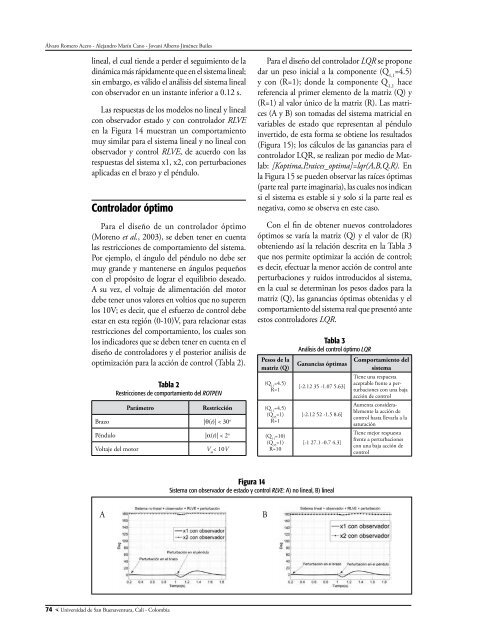
Álvaro Romero Acero - Alejandro Marín Cano - Jovani Alberto Jiménez Buileslineal, el cual tien<strong>de</strong> a per<strong>de</strong>r el seguimiento <strong>de</strong> ladinámica más rápidamente que en el sistema lineal;sin embargo, es válido el análisis <strong>de</strong>l sistema linealcon observador en un instante inferior a 0.12 s.Las respuestas <strong>de</strong> los mo<strong>de</strong>los no lineal y linealcon observador estado y con controlador RLVEen la Figura 14 muestran un comportamientomuy similar para el sistema lineal y no lineal conobservador y control RLVE, <strong>de</strong> acuerdo con lasrespuestas <strong>de</strong>l sistema x1, x2, con perturbacionesaplicadas en el brazo y el péndulo.Controlador óptimoPara el diseño <strong>de</strong> un controlador óptimo(Moreno et al., 2003), se <strong>de</strong>ben tener en cuentalas restricciones <strong>de</strong> comportamiento <strong>de</strong>l sistema.Por ejemplo, el ángulo <strong>de</strong>l péndulo no <strong>de</strong>be sermuy gran<strong>de</strong> y mantenerse en ángulos pequeñoscon el propósito <strong>de</strong> lograr el equilibrio <strong>de</strong>seado.A su vez, el voltaje <strong>de</strong> alimentación <strong>de</strong>l motor<strong>de</strong>be tener unos valores en voltios que no superenlos 10V; es <strong>de</strong>cir, que el esfuerzo <strong>de</strong> control <strong>de</strong>beestar en esta región (0-10)V, para relacionar estasrestricciones <strong>de</strong>l comportamiento, los cuales sonlos indicadores que se <strong>de</strong>ben tener en cuenta en eldiseño <strong>de</strong> controladores y el posterior análisis <strong>de</strong>optimización para la acción <strong>de</strong> control (Tabla 2).BrazoPénduloTabla 2Restricciones <strong>de</strong> comportamiento <strong>de</strong>l ROTPENVoltaje <strong>de</strong>l motorParámetroRestricción|θ(t)| < 30 o|α(t)| < 2 oV m< 10VPara el diseño <strong>de</strong>l controlador LQR se proponedar un peso inicial a la componente (Q 1,1=4.5)y con (R=1); don<strong>de</strong> la componente Q 1,1hacereferencia al primer elemento <strong>de</strong> la matriz (Q) y(R=1) al valor único <strong>de</strong> la matriz (R). Las matrices(A y B) son tomadas <strong>de</strong>l sistema matricial envariables <strong>de</strong> estado que representan al pénduloinvertido, <strong>de</strong> esta forma se obtiene los resultados(Figura 15); los cálculos <strong>de</strong> las ganancias para elcontrolador LQR, se realizan por medio <strong>de</strong> Matlab:[Koptima,P,raices_optima]=lqr(A,B,Q,R). Enla Figura 15 se pue<strong>de</strong>n observar las raíces óptimas(parte real parte imaginaria), las cuales nos indicansi el sistema es estable si y solo si la parte real esnegativa, como se observa en este caso.Con el fin <strong>de</strong> obtener nuevos controladoresóptimos se varía la matriz (Q) y el valor <strong>de</strong> (R)obteniendo así la relación <strong>de</strong>scrita en la Tabla 3que nos permite optimizar la acción <strong>de</strong> control;es <strong>de</strong>cir, efectuar la menor acción <strong>de</strong> control anteperturbaciones y ruidos introducidos al sistema,en la cual se <strong>de</strong>terminan los pesos dados para lamatriz (Q), las ganancias óptimas obtenidas y elcomportamiento <strong>de</strong>l sistema real que presentó anteestos controladores LQR.Pesos <strong>de</strong> lamatriz (Q)(Q 11=4.5)R=1(Q 11=4.5)(Q 33=1)R=1(Q 11=10)(Q 33=1)R=10Tabla 3Análisis <strong>de</strong>l control óptimo LQRComportamiento <strong>de</strong>lGanancias óptimassistema[-2.12 35 -1.07 5.63][-2.12 52 -1.5 8.6][-1 27.1 -0.7 4.3]Tiene una respuestaaceptable frente a perturbacionescon una bajaacción <strong>de</strong> controlAumenta consi<strong>de</strong>rablementela acción <strong>de</strong>control hasta llevarla a lasaturaciónTiene mejor respuestafrente a perturbacionescon una baja acción <strong>de</strong>controlFigura 14Sistema con observador <strong>de</strong> estado y control RLVE: A) no lineal, B) linealAB74 × <strong>Universidad</strong> <strong>de</strong> <strong>San</strong> Buenaventura, Cali - Colombia