

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
iconoscimento del <strong>laser</strong>. Infatti, avviando il programma con gli stessi coman<strong>di</strong> del programma<br />
“Caramelle”, quelli relativi al <strong>laser</strong> non vengono riconosciuti. Andando poi a vedere come è stato<br />
scritto il programma, si nota che non è presente il connettore al <strong>laser</strong>. Una volta aggi<strong>un</strong>to, il <strong>laser</strong><br />
viene riconosciuto e il programma sonArnlServer può partire. Per controllare efficacemente ciò<br />
che fa questo programma server, serve <strong>un</strong> programma client che può girare sia sulla stessa<br />
macchina sia su <strong>un</strong>’altra. Quello più conveniente da utilizzare è MobileEyes, sempre fornito dalla<br />
MobileRobots, dotato <strong>di</strong> <strong>un</strong>’interfaccia grafica molto intuitiva e semplice. Esso può essere avviato<br />
sulla stessa macchina oppure, molto più efficacemente, da remoto. In quest'ultimo caso, la prima<br />
cosa che viene richiesta è l’in<strong>di</strong>rizzo IP e la password del server a cui connettersi (in questo caso<br />
bisogna fornire l’in<strong>di</strong>rizzo IP e la password del calcolatore su cui sta girando SonArnlServer). In<br />
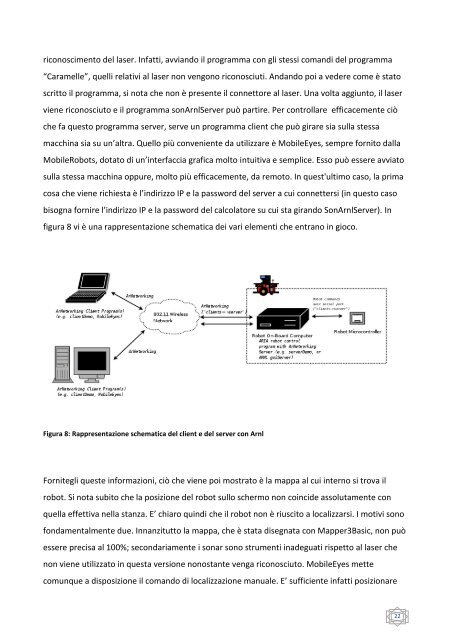
figura 8 vi è <strong>un</strong>a rappresentazione schematica dei vari elementi che entrano in gioco.<br />
Figura 8: Rappresentazione schematica del client e del server con Arnl<br />
Fornitegli queste informazioni, ciò che viene poi mostrato è la mappa al cui interno si trova il<br />
<strong>robot</strong>. Si nota subito che la posizione del <strong>robot</strong> sullo schermo non coincide assolutamente con<br />
quella effettiva nella stanza. E’ chiaro quin<strong>di</strong> che il <strong>robot</strong> non è riuscito a localizzarsi. I motivi sono<br />
fondamentalmente due. Innanzitutto la mappa, che è stata <strong>di</strong>segnata con Mapper3Basic, non può<br />
essere precisa al 100%; secondariamente i sonar sono strumenti inadeguati rispetto al <strong>laser</strong> che<br />
non viene utilizzato in questa versione nonostante venga riconosciuto. MobileEyes mette<br />
com<strong>un</strong>que a <strong>di</strong>sposizione il comando <strong>di</strong> localizzazione manuale. E’ sufficiente infatti posizionare<br />
22













