

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Figura 11: Una fotografia della stazione <strong>di</strong> ricarica durante la costruzione<br />
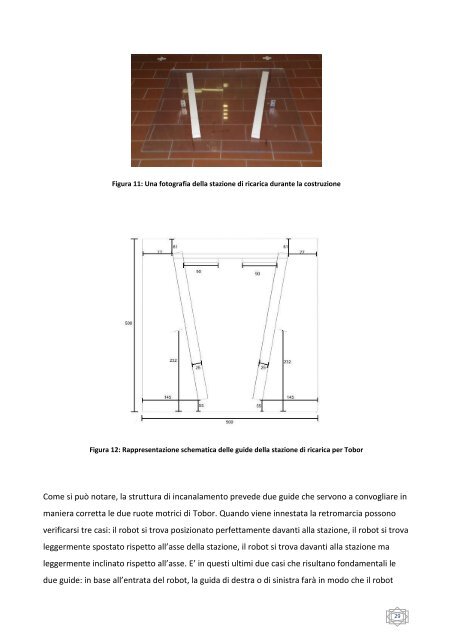
Figura 12: Rappresentazione schematica delle guide della stazione <strong>di</strong> ricarica per Tobor<br />
Come si può notare, la struttura <strong>di</strong> incanalamento prevede due guide che servono a convogliare in<br />
maniera corretta le due ruote motrici <strong>di</strong> Tobor. Quando viene innestata la retromarcia possono<br />
verificarsi tre casi: il <strong>robot</strong> si trova posizionato perfettamente davanti alla stazione, il <strong>robot</strong> si trova<br />
leggermente spostato rispetto all’asse della stazione, il <strong>robot</strong> si trova davanti alla stazione ma<br />
leggermente inclinato rispetto all’asse. E’ in questi ultimi due casi che risultano fondamentali le<br />
due guide: in base all’entrata del <strong>robot</strong>, la guida <strong>di</strong> destra o <strong>di</strong> sinistra farà in modo che il <strong>robot</strong><br />
29













