

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
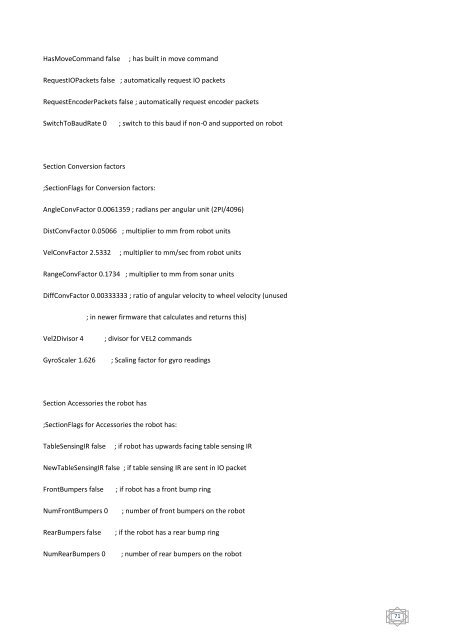
HasMoveCommand false ; has built in move command<br />
RequestIOPackets false ; automatically request IO packets<br />
RequestEncoderPackets false ; automatically request encoder packets<br />
SwitchToBaudRate 0 ; switch to this baud if non-0 and supported on <strong>robot</strong><br />
Section Conversion factors<br />
;SectionFlags for Conversion factors:<br />
AngleConvFactor 0.0061359 ; ra<strong>di</strong>ans per angular <strong>un</strong>it (2PI/4096)<br />
DistConvFactor 0.05066 ; multiplier to mm from <strong>robot</strong> <strong>un</strong>its<br />
VelConvFactor 2.5332 ; multiplier to mm/sec from <strong>robot</strong> <strong>un</strong>its<br />
RangeConvFactor 0.1734 ; multiplier to mm from sonar <strong>un</strong>its<br />
DiffConvFactor 0.00333333 ; ratio of angular velocity to wheel velocity (<strong>un</strong>used<br />
; in newer firmware that calculates and returns this)<br />
Vel2Divisor 4 ; <strong>di</strong>visor for VEL2 commands<br />
GyroScaler 1.626 ; Scaling factor for gyro rea<strong>di</strong>ngs<br />
Section Accessories the <strong>robot</strong> has<br />
;SectionFlags for Accessories the <strong>robot</strong> has:<br />
TableSensingIR false ; if <strong>robot</strong> has upwards facing table sensing IR<br />
NewTableSensingIR false ; if table sensing IR are sent in IO packet<br />
FrontBumpers false ; if <strong>robot</strong> has a front bump ring<br />
NumFrontBumpers 0 ; number of front bumpers on the <strong>robot</strong><br />
RearBumpers false ; if the <strong>robot</strong> has a rear bump ring<br />
NumRearBumpers 0 ; number of rear bumpers on the <strong>robot</strong><br />
71













