

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
La pagina <strong>di</strong> stato<br />
A fianco della pagina <strong>di</strong> comando <strong>di</strong> Tobor, viene caricata <strong>un</strong>’altra pagina web che mostra lo stato<br />
del <strong>robot</strong>. Viene visualizzata in tempo reale ogni mossa <strong>di</strong> Tobor. Ad esempio compare il prossimo<br />
goal a cui il <strong>robot</strong> è <strong>di</strong>retto, oppure se si trova in modalità <strong>di</strong> wandering, o altre informazioni sullo<br />
stato <strong>di</strong> Tobor. Questo grazie all’implementazione <strong>di</strong> <strong>un</strong>a CGI che, a <strong>di</strong>fferenza dei casi precedenti,<br />
carica <strong>un</strong>a vera e propria pagina web. Infatti nello script Bash è presente la riga <strong>di</strong> co<strong>di</strong>ce “echo -e<br />
"Content-type: text/html\n". Per visualizzare poi le varie caratteristiche <strong>di</strong> stato, vengono invocati<br />
dei client che stampano a video le informazioni richieste, filtrate, dove necessario, attraverso il<br />
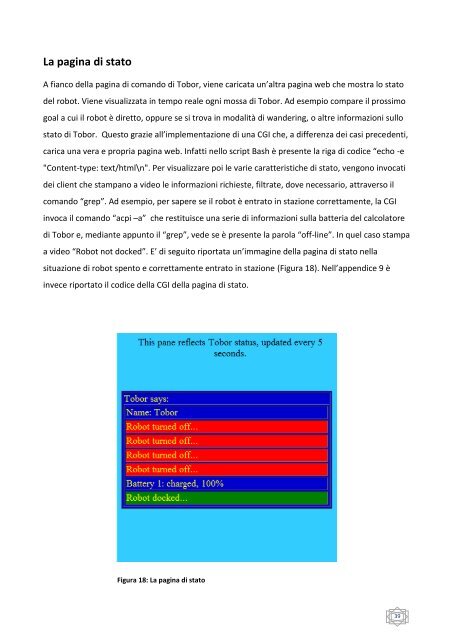
comando “grep”. Ad esempio, per sapere se il <strong>robot</strong> è entrato in stazione correttamente, la CGI<br />
invoca il comando “acpi –a” che restituisce <strong>un</strong>a serie <strong>di</strong> informazioni sulla batteria del calcolatore<br />
<strong>di</strong> Tobor e, me<strong>di</strong>ante app<strong>un</strong>to il “grep”, vede se è presente la parola “off-line”. In quel caso stampa<br />
a video “Robot not docked”. E’ <strong>di</strong> seguito riportata <strong>un</strong>’immagine della pagina <strong>di</strong> stato nella<br />
situazione <strong>di</strong> <strong>robot</strong> spento e correttamente entrato in stazione (Figura 18). Nell’appen<strong>di</strong>ce 9 è<br />
invece riportato il co<strong>di</strong>ce della CGI della pagina <strong>di</strong> stato.<br />
Figura 18: La pagina <strong>di</strong> stato<br />
39













