

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
scelto e con estensione “.2d”. Questo non è il file a tutti gli effetti della mappa, anche perché il<br />
programma per poter partire ha bisogno <strong>di</strong> <strong>un</strong> file con estensione “.map”. Bisogna allora<br />
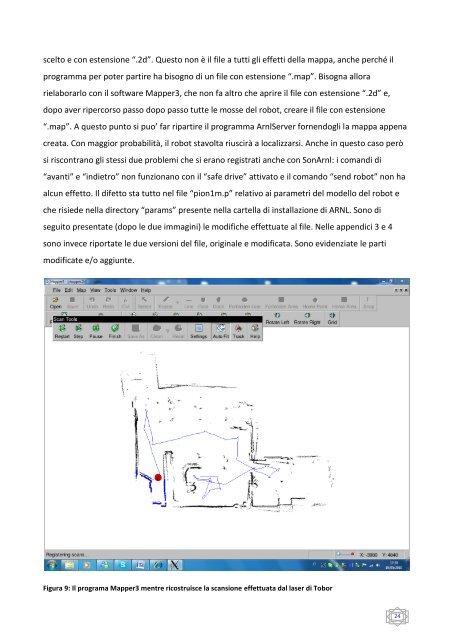
rielaborarlo con il software Mapper3, che non fa altro che aprire il file con estensione “.2d” e,<br />
dopo aver ripercorso passo dopo passo tutte le mosse del <strong>robot</strong>, creare il file con estensione<br />
“.map”. A questo p<strong>un</strong>to si puo’ far ripartire il programma ArnlServer fornendogli la mappa appena<br />
creata. Con maggior probabilità, il <strong>robot</strong> stavolta riuscirà a localizzarsi. Anche in questo caso però<br />
si riscontrano gli stessi due problemi che si erano registrati anche con SonArnl: i coman<strong>di</strong> <strong>di</strong><br />
“avanti” e “in<strong>di</strong>etro” non f<strong>un</strong>zionano con il “safe drive” attivato e il comando “send <strong>robot</strong>” non ha<br />
alc<strong>un</strong> effetto. Il <strong>di</strong>fetto sta tutto nel file “pion1m.p” relativo ai parametri del modello del <strong>robot</strong> e<br />
che risiede nella <strong>di</strong>rectory “params” presente nella cartella <strong>di</strong> installazione <strong>di</strong> ARNL. Sono <strong>di</strong><br />
seguito presentate (dopo le due immagini) le mo<strong>di</strong>fiche effettuate al file. Nelle appen<strong>di</strong>ci 3 e 4<br />
sono invece riportate le due versioni del file, originale e mo<strong>di</strong>ficata. Sono evidenziate le parti<br />
mo<strong>di</strong>ficate e/o aggi<strong>un</strong>te.<br />
Figura 9: Il programa Mapper3 mentre ricostruisce la scansione effettuata dal <strong>laser</strong> <strong>di</strong> Tobor<br />
24













