

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
In figura 2 sono presenti tre <strong>robot</strong> (<strong>di</strong> colore rosso) che si muovono all’interno <strong>di</strong> <strong>un</strong>a mappa.<br />
Quello in alto si muove con l’ausilio <strong>di</strong> sonar (rappresentati dai raggi che si <strong>di</strong>partono dal <strong>robot</strong><br />
stesso). Quello in mezzo è fermo, mentre quello in basso possiede <strong>un</strong> <strong>laser</strong> la cui azione è<br />
rappresentata dall’ “ombra” azzurra.<br />
Mapper3basic è invece <strong>un</strong> software per <strong>di</strong>segnare mappe <strong>di</strong> ambienti. Ha <strong>un</strong>’interfaccia molto<br />
semplice che permette <strong>di</strong> tracciare linee su sfondo bianco. Potrebbe essere utile nel caso in cui<br />
non si <strong>di</strong>sponesse <strong>di</strong> software avanzati per la creazione <strong>di</strong> mappe me<strong>di</strong>ante <strong>laser</strong> o simili, oppure<br />
per fare delle prove <strong>di</strong> creazione <strong>di</strong> mappe da passare poi a MobileSim.<br />
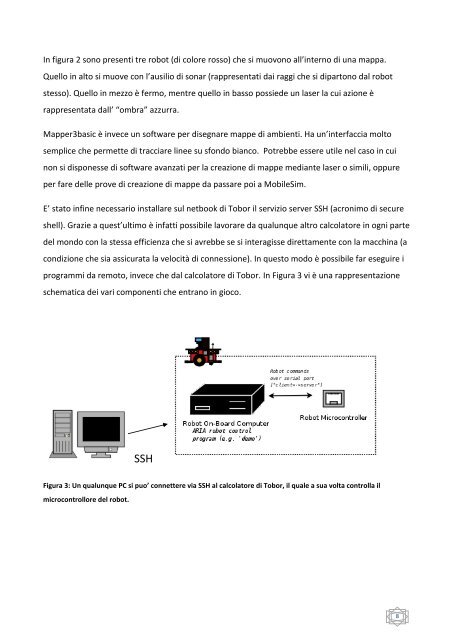
E’ stato infine necessario installare sul netbook <strong>di</strong> Tobor il servizio server SSH (acronimo <strong>di</strong> secure<br />
shell). Grazie a quest’ultimo è infatti possibile lavorare da qual<strong>un</strong>que altro calcolatore in ogni parte<br />
del mondo con la stessa efficienza che si avrebbe se si interagisse <strong>di</strong>rettamente con la macchina (a<br />
con<strong>di</strong>zione che sia assicurata la velocità <strong>di</strong> connessione). In questo modo è possibile far eseguire i<br />
programmi da remoto, invece che dal calcolatore <strong>di</strong> Tobor. In Figura 3 vi è <strong>un</strong>a rappresentazione<br />
schematica dei vari componenti che entrano in gioco.<br />
SSH<br />
Figura 3: Un qual<strong>un</strong>que PC si puo’ connettere via SSH al calcolatore <strong>di</strong> Tobor, il quale a sua volta controlla il<br />
microcontrollore del <strong>robot</strong>.<br />
8













