

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
fisicamente <strong>un</strong>a porta usb. Si è poi provveduto ad installare le librerie necessarie al f<strong>un</strong>zionamento<br />
del <strong>robot</strong>, <strong>di</strong>sponibili sul sito della “Mobile Robots” e raccolte nella suite denominata “ARIA”. Essa<br />
offre numerosi programmi oltre alle sopra citate librerie. Fra <strong>di</strong> essi, due in particolare sono stati<br />
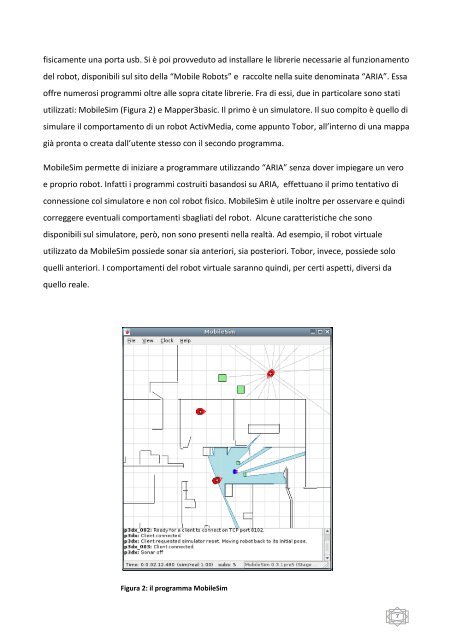
utilizzati: MobileSim (Figura 2) e Mapper3basic. Il primo è <strong>un</strong> simulatore. Il suo compito è quello <strong>di</strong><br />
simulare il comportamento <strong>di</strong> <strong>un</strong> <strong>robot</strong> ActivMe<strong>di</strong>a, come app<strong>un</strong>to Tobor, all’interno <strong>di</strong> <strong>un</strong>a mappa<br />
già pronta o creata dall’utente stesso con il secondo programma.<br />
MobileSim permette <strong>di</strong> iniziare a programmare utilizzando “ARIA” senza dover impiegare <strong>un</strong> vero<br />
e proprio <strong>robot</strong>. Infatti i programmi costruiti basandosi su ARIA, effettuano il primo tentativo <strong>di</strong><br />
connessione col simulatore e non col <strong>robot</strong> fisico. MobileSim è utile inoltre per osservare e quin<strong>di</strong><br />
correggere eventuali comportamenti sbagliati del <strong>robot</strong>. Alc<strong>un</strong>e caratteristiche che sono<br />
<strong>di</strong>sponibili sul simulatore, però, non sono presenti nella realtà. Ad esempio, il <strong>robot</strong> virtuale<br />
utilizzato da MobileSim possiede sonar sia anteriori, sia posteriori. Tobor, invece, possiede solo<br />
quelli anteriori. I comportamenti del <strong>robot</strong> virtuale saranno quin<strong>di</strong>, per certi aspetti, <strong>di</strong>versi da<br />
quello reale.<br />
Figura 2: il programma MobileSim<br />
7













