

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
stazione <strong>di</strong> ricarica. Questo è stato necessario per correggere quel margine <strong>di</strong> errore del<br />
<strong>laser</strong>, le cui rilevazioni tendevano a far posizionare il <strong>robot</strong> leggermente spostato rispetto<br />
alla posizione ottimale per il rientro.<br />
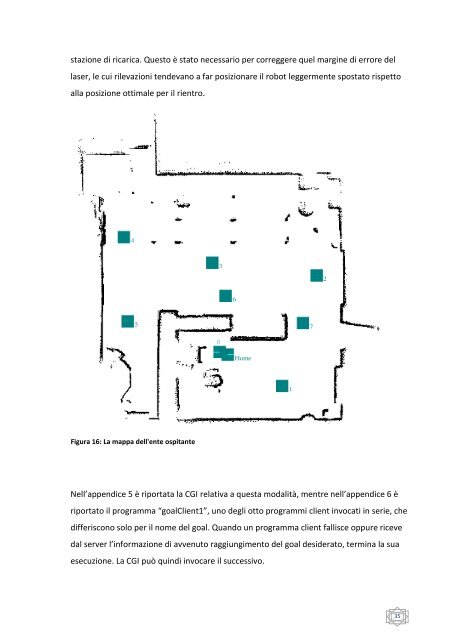
Figura 16: La mappa dell'ente ospitante<br />
Nell’appen<strong>di</strong>ce 5 è riportata la CGI relativa a questa modalità, mentre nell’appen<strong>di</strong>ce 6 è<br />
riportato il programma “goalClient1”, <strong>un</strong>o degli otto programmi client invocati in serie, che<br />
<strong>di</strong>fferiscono solo per il nome del goal. Quando <strong>un</strong> programma client fallisce oppure riceve<br />
dal server l’informazione <strong>di</strong> avvenuto raggi<strong>un</strong>gimento del goal desiderato, termina la sua<br />
esecuzione. La CGI può quin<strong>di</strong> invocare il successivo.<br />
35













