

"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010
"Applicazione di un laser range scanner a un robot mobile", 2010

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
In Figura 9 è possibile osservare il programma Mapper3 mentre rielabora tutti i movimenti fatti dal<br />
<strong>robot</strong> (rappresentato dal pallino rosso) durante la scansione dell’ambiente. La mappa della stanza<br />
nel frattempo viene <strong>di</strong>segnata.<br />
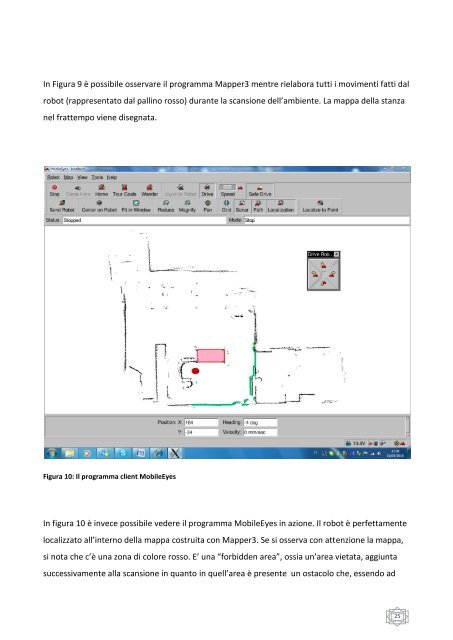
Figura 10: Il programma client MobileEyes<br />
In figura 10 è invece possibile vedere il programma MobileEyes in azione. Il <strong>robot</strong> è perfettamente<br />
localizzato all’interno della mappa costruita con Mapper3. Se si osserva con attenzione la mappa,<br />
si nota che c’è <strong>un</strong>a zona <strong>di</strong> colore rosso. E’ <strong>un</strong>a “forbidden area”, ossia <strong>un</strong>’area vietata, aggi<strong>un</strong>ta<br />
successivamente alla scansione in quanto in quell’area è presente <strong>un</strong> ostacolo che, essendo ad<br />
25













