- Seite 2 und 3:
Vorkurs Informatik
- Seite 4 und 5:
Prof. Dr. Heinrich Müller Technisc
- Seite 6 und 7:
VI tenstrukturen. Die Kenntnis solc
- Seite 8 und 9:
Inhaltsverzeichnis Einleitung 1 Was
- Seite 10 und 11:
Inhaltsverzeichnis XI 13.4 Sortiere
- Seite 12 und 13:
Einleitung Das Ziel dieses Buches i
- Seite 14 und 15:
Einleitung 3 Es gibt zwei Typen von
- Seite 16 und 17:
Was ist Informatik?
- Seite 18 und 19:
8 1 Informatik Informationsverarbei
- Seite 20 und 21:
10 1 Informatik Technische Informat
- Seite 22 und 23:
Programmierung
- Seite 24 und 25:
16 2 Vom Problem über den Algorith
- Seite 26 und 27:
18 2 Vom Problem über den Algorith
- Seite 28 und 29:
20 2 Vom Problem über den Algorith
- Seite 30 und 31:
22 2 Vom Problem über den Algorith
- Seite 32 und 33:
24 3 Algorithmenentwurf 1 Setze mer
- Seite 34 und 35:
26 3 Algorithmenentwurf Wertzuweisu
- Seite 36 und 37:
28 3 Algorithmenentwurf i:=0; i 0 i
- Seite 38 und 39:
30 3 Algorithmenentwurf Anweisung 1
- Seite 40 und 41:
32 3 Algorithmenentwurf Aufgabe 3.9
- Seite 42 und 43:
34 3 Algorithmenentwurf merker := a
- Seite 44 und 45:
4 Grundkonzepte der Programmierung
- Seite 46 und 47:
4.2 Grundstruktur von Java-Programm
- Seite 48 und 49:
4.2 Grundstruktur von Java-Programm
- Seite 50 und 51:
4.2 Grundstruktur von Java-Programm
- Seite 52 und 53:
4.3 Beispiel: Minimum einer Menge v
- Seite 54 und 55:
4.4 Variablen 47 Dieses Beispielpro
- Seite 56 und 57:
4.4 Variablen 49 Alle in einem Prog
- Seite 58 und 59:
4.5 Datentypen 51 4.5 Datentypen Un
- Seite 60 und 61:
4.5 Datentypen 53 Die Datentypen do
- Seite 62 und 63:
4.5 Datentypen 55 Index 11 7 8 3 13
- Seite 64 und 65:
4.6 Operatoren und Ausdrücke 57 Op
- Seite 66 und 67:
4.6 Operatoren und Ausdrücke 59 Be
- Seite 68 und 69:
4.6 Operatoren und Ausdrücke 61 Zu
- Seite 70 und 71:
4.7 Typkonvertierung 63 byte short
- Seite 72 und 73:
4.8 Anweisungen und Ablaufstrukture
- Seite 74 und 75:
4.8 Anweisungen und Ablaufstrukture
- Seite 76 und 77:
4.8 Anweisungen und Ablaufstrukture
- Seite 78 und 79:
4.9 Konventionen 71 eine Übergabe
- Seite 80 und 81:
4.10 Beispiel: Mittelwert einer Fol
- Seite 82 und 83:
4.10 Beispiel: Mittelwert einer Fol
- Seite 84 und 85:
5 Funktionen Dieses Kapitel erweite
- Seite 86 und 87:
5.1 Beispiel: Sortieren einer Menge
- Seite 88 und 89:
5.1 Beispiel: Sortieren einer Menge
- Seite 90 und 91:
5.1 Beispiel: Sortieren einer Menge
- Seite 92 und 93:
5.2 Funktionen 85 main bekannt. Die
- Seite 94 und 95:
5.2 Funktionen 87 Zusammenfassung 5
- Seite 96 und 97:
5.3 Gültigkeitsbereich von Deklara
- Seite 98 und 99:
5.3 Gültigkeitsbereich von Deklara
- Seite 100 und 101:
94 6 Rekursion Algorithmus: mischSo
- Seite 102 und 103:
96 6 Rekursion Durchlauf folge1 fol
- Seite 104 und 105:
98 6 Rekursion 1 static int[] misch
- Seite 106 und 107:
100 6 Rekursion 1 static int[] misc
- Seite 108 und 109:
102 6 Rekursion 11, 7, 8, 3, 15, 13
- Seite 110 und 111:
104 6 Rekursion Zu Beginn der main-
- Seite 112 und 113:
106 6 Rekursion 1 mischen(folge1,fo
- Seite 114 und 115:
108 6 Rekursion Aufgabe 6.4: Progra
- Seite 116 und 117:
110 7 Klassen und Objekte Array ohn
- Seite 118 und 119:
112 7 Klassen und Objekte Algorithm
- Seite 120 und 121:
114 7 Klassen und Objekte 1 class S
- Seite 122 und 123:
116 7 Klassen und Objekte 7.2.2 Dek
- Seite 124 und 125:
118 7 Klassen und Objekte Zusammenf
- Seite 126 und 127:
120 7 Klassen und Objekte selbst um
- Seite 128 und 129:
122 7 Klassen und Objekte Klasse St
- Seite 130 und 131:
124 7 Klassen und Objekte Parameter
- Seite 132 und 133:
126 7 Klassen und Objekte wird zun
- Seite 134 und 135:
128 7 Klassen und Objekte Aufgabe 7
- Seite 136 und 137:
130 7 Klassen und Objekte Aufgabe 7
- Seite 138 und 139:
132 7 Klassen und Objekte 2. Studie
- Seite 140 und 141:
134 7 Klassen und Objekte 7. aktuel
- Seite 142 und 143:
8 Objektorientierte Programmierung
- Seite 144 und 145:
8.1 Objektorientierte Modellierung
- Seite 146 und 147:
8.1 Objektorientierte Modellierung
- Seite 148 und 149:
8.2 UML-Notation 143 Abbildung 8.4:
- Seite 150 und 151:
8.3 Vererbung 145 hinzukommen, die
- Seite 152 und 153:
8.3 Vererbung 147 1 class Bachelor
- Seite 154 und 155:
8.3 Vererbung 149 Der Aufruf des Ob
- Seite 156 und 157:
8.3 Vererbung 151 genutzt. Hierbei
- Seite 158 und 159:
8.3 Vererbung 153 gemeinsamen Oberk
- Seite 160 und 161:
8.4 Sichtbarkeit von Information 15
- Seite 162 und 163:
8.4 Sichtbarkeit von Information 15
- Seite 164 und 165:
8.5 Polymorphismus 159 1 // --- Kla
- Seite 166 und 167:
8.5 Polymorphismus 161 public class
- Seite 168 und 169:
8.5 Polymorphismus 163 Zusammenfass
- Seite 170 und 171:
8.5 Polymorphismus 165 c) Da die Ge
- Seite 172 und 173:
168 9 Klassenbibliotheken aus der K
- Seite 174 und 175:
170 9 Klassenbibliotheken 1 2 3 J
- Seite 176 und 177:
172 9 Klassenbibliotheken 1 class C
- Seite 178 und 179:
174 9 Klassenbibliotheken Im weiter
- Seite 180 und 181:
176 9 Klassenbibliotheken 9.5 Paket
- Seite 182 und 183:
178 9 Klassenbibliotheken private p
- Seite 184 und 185:
180 9 Klassenbibliotheken Abbildung
- Seite 186 und 187:
182 10 Grafikprogrammierung mit Swi
- Seite 188 und 189:
184 10 Grafikprogrammierung mit Swi
- Seite 190 und 191:
186 10 Grafikprogrammierung mit Swi
- Seite 192 und 193:
188 10 Grafikprogrammierung mit Swi
- Seite 194 und 195:
190 10 Grafikprogrammierung mit Swi
- Seite 196 und 197:
192 10 Grafikprogrammierung mit Swi
- Seite 198 und 199:
194 10 Grafikprogrammierung mit Swi
- Seite 200 und 201:
196 10 Grafikprogrammierung mit Swi
- Seite 202 und 203:
198 10 Grafikprogrammierung mit Swi
- Seite 204 und 205:
200 10 Grafikprogrammierung mit Swi
- Seite 206 und 207:
202 10 Grafikprogrammierung mit Swi
- Seite 208 und 209:
204 10 Grafikprogrammierung mit Swi
- Seite 210 und 211:
11 Andere Programmierstile In den v
- Seite 212 und 213:
11.4 Logische Programmierung 209 11
- Seite 214 und 215:
12 Asymptotische Aufwandsanalyse Wi
- Seite 216 und 217:
12.1 Zeitaufwand 215 c 0 . g n 0 f
- Seite 218 und 219:
12.2 Speicheraufwand 217 Zusammenfa
- Seite 220 und 221:
220 13 Sortieren Die zweite Spalte
- Seite 222 und 223:
222 13 Sortieren Algorithmus mische
- Seite 224 und 225:
224 13 Sortieren T(0)=c 0 , T(n)=T(
- Seite 226 und 227:
226 13 Sortieren Der zweite Teil ei
- Seite 228 und 229: 228 13 Sortieren Die Behauptung ist
- Seite 230 und 231: 230 13 Sortieren Induktionsschritt:
- Seite 232 und 233: 232 13 Sortieren c) Führen Sie bei
- Seite 234 und 235: 234 14 Mengen Gegeben: Eine Menge S
- Seite 236 und 237: 236 14 Mengen 1 Algorithmus fuegeEi
- Seite 238 und 239: 238 14 Mengen Datenstruktur: Abbild
- Seite 240 und 241: 240 14 Mengen Algorithmus suche(s,
- Seite 242 und 243: 242 14 Mengen Aufgabe 14.4: Führen
- Seite 244 und 245: 244 14 Mengen 10 7 15 4 9 13 19 3 8
- Seite 246 und 247: 246 14 Mengen w w 1 w 2 Abbildung 1
- Seite 248 und 249: 248 14 Mengen Zusammenfassung 14.2
- Seite 250 und 251: 250 14 Mengen dbaum Referenz_1 8863
- Seite 252 und 253: 252 14 Mengen Im ungünstigsten Fal
- Seite 254 und 255: 254 14 Mengen Zusammenfassung 14.5
- Seite 256 und 257: 15 Hardware und Programmierung Eine
- Seite 258 und 259: 16 Rechnerarchitektur und Maschinen
- Seite 260 und 261: 16.2 Hauptspeicher 261 Der Vorteil
- Seite 262 und 263: 16.3 Prozessor, Befehlssatz und Mas
- Seite 264 und 265: 16.3 Prozessor, Befehlssatz und Mas
- Seite 266 und 267: 17 Schaltungen Schaltungen verknüp
- Seite 268 und 269: 17.1 Zweiwertige Informationsdarste
- Seite 270 und 271: 17.2 Boolesche Funktionen 271 a b a
- Seite 272 und 273: 17.2 Boolesche Funktionen 273 a b c
- Seite 274 und 275: 17.3 Schaltungen 275 a and not b an
- Seite 276 und 277: 17.3 Schaltungen 277 1-Bit-Halbaddi
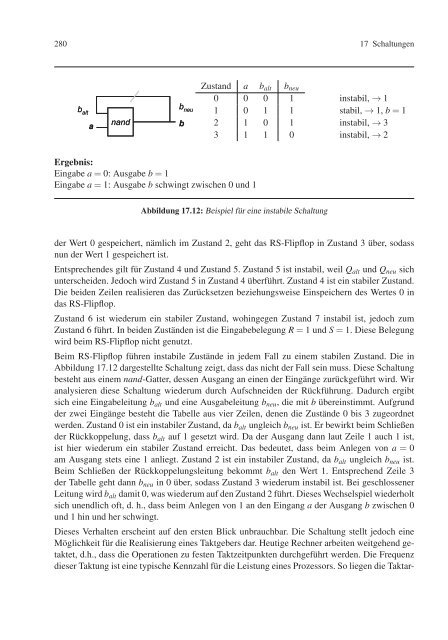
- Seite 280 und 281: 17.3 Schaltungen 281 ten heutiger P
- Seite 282 und 283: 284 18 Formale Sprachen und Compile
- Seite 284 und 285: 286 18 Formale Sprachen und Compile
- Seite 286 und 287: 288 18 Formale Sprachen und Compile
- Seite 288 und 289: 290 18 Formale Sprachen und Compile
- Seite 290 und 291: 292 18 Formale Sprachen und Compile
- Seite 292 und 293: 294 18 Formale Sprachen und Compile
- Seite 294 und 295: 296 18 Formale Sprachen und Compile
- Seite 296 und 297: 298 18 Formale Sprachen und Compile
- Seite 298 und 299: 300 18 Formale Sprachen und Compile
- Seite 300 und 301: 302 18 Formale Sprachen und Compile
- Seite 302 und 303: 304 18 Formale Sprachen und Compile
- Seite 304 und 305: Anhang
- Seite 306 und 307: 310 A Schlüsselwörter im Sprachum
- Seite 308 und 309: 312 A Schlüsselwörter im Sprachum
- Seite 310 und 311: 314 B Grundlagen der Java-Programmi
- Seite 312 und 313: 316 B Grundlagen der Java-Programmi
- Seite 314 und 315: 318 B Grundlagen der Java-Programmi
- Seite 316 und 317: 320 B Grundlagen der Java-Programmi
- Seite 318 und 319: 322 B Grundlagen der Java-Programmi
- Seite 320 und 321: 324 B Grundlagen der Java-Programmi
- Seite 322 und 323: 326 B Grundlagen der Java-Programmi
- Seite 324 und 325: 328 C Programmieren in C++ vorliege
- Seite 326 und 327: 330 C Programmieren in C++ 1 // Vor
- Seite 328 und 329:
332 C Programmieren in C++ Daten Ty
- Seite 330 und 331:
334 C Programmieren in C++ 1 #inclu
- Seite 332 und 333:
336 C Programmieren in C++ (a) Arra
- Seite 334 und 335:
338 C Programmieren in C++ (a) int
- Seite 336 und 337:
340 C Programmieren in C++ Diese In
- Seite 338 und 339:
342 C Programmieren in C++ &ptr_2 l
- Seite 340 und 341:
344 C Programmieren in C++ 1 #inclu
- Seite 342 und 343:
346 C Programmieren in C++ 1 #inclu
- Seite 344 und 345:
348 C Programmieren in C++ 1 #ifnde
- Seite 346 und 347:
350 C Programmieren in C++ Abbildun
- Seite 348 und 349:
352 C Programmieren in C++ Entsprec
- Seite 350 und 351:
354 D Literaturverzeichnis Datenstr
- Seite 352 und 353:
356 Stichwortverzeichnis sortiertes
- Seite 354 und 355:
358 Stichwortverzeichnis Eingabeanw
- Seite 356 und 357:
360 Stichwortverzeichnis Java 2D, 1
- Seite 358 und 359:
362 Stichwortverzeichnis Entwurf, 1
- Seite 360 und 361:
364 Stichwortverzeichnis binärer,