

Beispiele mechatronischer Systeme

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
9.2 Funktionsentwicklung und Applikation in der MSG-Entwicklung xiii<br />
9.2.2 Problembeschreibung und Motivation<br />
Das Fahrverhalten eines Fahrzeugs muss je nach Fahrzeugvariante einen hohen Komfort, eine<br />
sportliche Fahrweise oder eine Kombination aus beiden Kriterien zulassen. Die Entwicklung<br />
von direkteinspritzenden, turboaufgeladenen DIESEL- und OTTO-Motoren hat dazu geführt,<br />
dass selbst kleine Motoren ein enormes Beschleunigungspotential bieten. Dadurch entwickeln<br />
sie schon bei niedrigen Drehzahlen in kürzester Zeit ein hohes Antriebsmoment. Dieser<br />
schnelle Momentenaufbau führt unweigerlich zu Antriebsstrangschwingungen, die in Bezug<br />
auf das Fahrverhalten den Komfort maßgeblich beeinflussen.<br />
Drehzahl [1/min]<br />
2600<br />
2400<br />
2200<br />
2000<br />
1800<br />
1600<br />
1400<br />
1200<br />
Drehzahl<br />
Moment<br />
0 2 4 6 8<br />
Zeit [s]<br />
150<br />
100<br />
50<br />
0<br />
Moment [Nm]<br />
Beschleunigung [m/s 2 ]<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
0 2 4 6 8<br />
Zeit [s]<br />
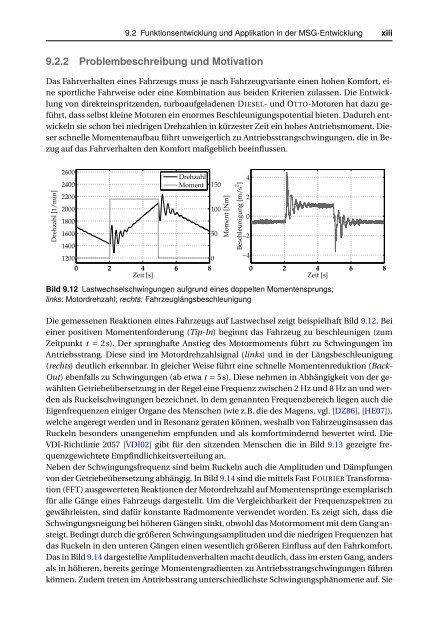
Bild 9.12 Lastwechselschwingungen aufgrund eines doppelten Momentensprungs;<br />
links: Motordrehzahl; rechts: Fahrzeuglängsbeschleunigung<br />
Die gemessenen Reaktionen eines Fahrzeugs auf Lastwechsel zeigt beispielhaft Bild 9.12. Bei<br />
einer positiven Momentenforderung (Tip-In) beginnt das Fahrzeug zu beschleunigen (zum<br />
Zeitpunkt t = 2s). Der sprunghafte Anstieg des Motormoments führt zu Schwingungen im<br />
Antriebsstrang. Diese sind im Motordrehzahlsignal (links) und in der Längsbeschleunigung<br />
(rechts) deutlich erkennbar. In gleicher Weise führt eine schnelle Momentenreduktion (Back-<br />
Out) ebenfalls zu Schwingungen (ab etwa t = 5s). Diese nehmen in Abhängigkeit von der gewählten<br />
Getriebeübersetzung in der Regel eine Frequenz zwischen 2 Hz und 8 Hz an und werden<br />
als Ruckelschwingungen bezeichnet. In dem genannten Frequenzbereich liegen auch die<br />
Eigenfrequenzen einiger Organe des Menschen (wie z.B. die des Magens, vgl. [DZ86], [HE07]),<br />
welche angeregt werden und in Resonanz geraten können, weshalb von Fahrzeuginsassen das<br />
Ruckeln besonders unangenehm empfunden und als komfortmindernd bewertet wird. Die<br />
VDI-Richtlinie 2057 [VDI02] gibt für den sitzenden Menschen die in Bild 9.13 gezeigte frequenzgewichtete<br />
Empfindlichkeitsverteilung an.<br />
Neben der Schwingungsfrequenz sind beim Ruckeln auch die Amplituden und Dämpfungen<br />
von der Getriebeübersetzung abhängig. In Bild 9.14 sind die mittels Fast FOURIER Transformation<br />
(FFT) ausgewerteten Reaktionen der Motordrehzahl auf Momentensprünge exemplarisch<br />
für alle Gänge eines Fahrzeugs dargestellt. Um die Vergleichbarkeit der Frequenzspektren zu<br />
gewährleisten, sind dafür konstante Radmomente verwendet worden. Es zeigt sich, dass die<br />
Schwingungsneigung bei höheren Gängen sinkt, obwohl das Motormoment mit dem Gang ansteigt.<br />
Bedingt durch die größeren Schwingungsamplituden und die niedrigen Frequenzen hat<br />
das Ruckeln in den unteren Gängen einen wesentlich größeren Einfluss auf den Fahrkomfort.<br />
Das in Bild 9.14 dargestellte Amplitudenverhalten macht deutlich, dass im ersten Gang, anders<br />
als in höheren, bereits geringe Momentengradienten zu Antriebsstrangschwingungen führen<br />
können. Zudem treten im Antriebsstrang unterschiedlichste Schwingungsphänomene auf. Sie

