

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
xlviii<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
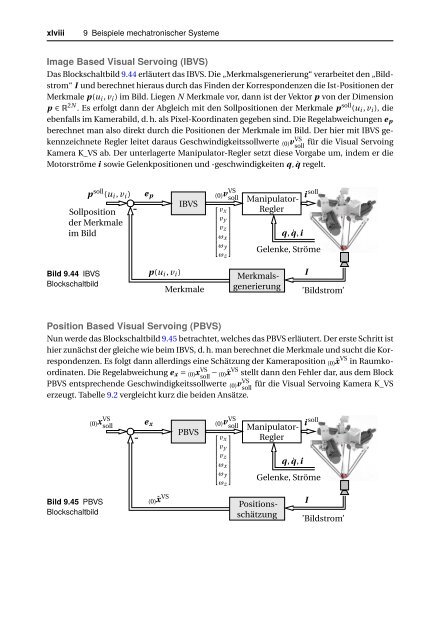
Image Based Visual Servoing (IBVS)<br />
Das Blockschaltbild 9.44 erläutert das IBVS. Die „Merkmalsgenerierung“ verarbeitet den „Bildstrom“<br />
I und berechnet hieraus durch das Finden der Korrespondenzen die Ist-Positionen der<br />
Merkmale p(u i , v i ) im Bild. Liegen N Merkmale vor, dann ist der Vektor p von der Dimension<br />
p ∈ R 2N . Es erfolgt dann der Abgleich mit den Sollpositionen der Merkmale p soll (u i , v i ), die<br />
ebenfalls im Kamerabild, d. h. als Pixel-Koordinaten gegeben sind. Die Regelabweichungen e p<br />
berechnet man also direkt durch die Positionen der Merkmale im Bild. Der hier mit IBVS gekennzeichnete<br />
Regler leitet daraus Geschwindigkeitssollwerte (0) v VS für die Visual Servoing<br />
soll<br />
Kamera K_VS ab. Der unterlagerte Manipulator-Regler setzt diese Vorgabe um, indem er die<br />
Motorströme i sowie Gelenkpositionen und -geschwindigkeiten q, ˙q regelt.<br />
p soll (u i , v i )<br />
Sollposition<br />
der Merkmale<br />
im Bild<br />
e p<br />
IBVS<br />
(0)v VS<br />
soll<br />
⎡ ⎤<br />
v x<br />
v y<br />
v z<br />
⎢ω x<br />
⎥<br />
⎣ω ⎦ y<br />
ω z<br />
Manipulator-<br />
Regler<br />
q, ˙q, i<br />
i soll<br />
Gelenke, Ströme<br />
Bild 9.44 IBVS<br />
Blockschaltbild<br />
Merkmals-<br />
generierung<br />
p(u i , v i )<br />
Merkmale<br />
I<br />
’Bildstrom’<br />
Position Based Visual Servoing (PBVS)<br />
Nun werde das Blockschaltbild 9.45 betrachtet, welches das PBVS erläutert. Der erste Schritt ist<br />
hier zunächst der gleiche wie beim IBVS, d. h. man berechnet die Merkmale und sucht die Korrespondenzen.<br />
Es folgt dann allerdings eine Schätzung der Kameraposition (0)ˆx VS in Raumkoordinaten.<br />
Die Regelabweichung e x = (0) x VS<br />
soll − (0)ˆx VS stellt dann den Fehler dar, aus dem Block<br />
PBVS entsprechende Geschwindigkeitssollwerte (0) v VS für die Visual Servoing Kamera K_VS<br />
soll<br />
erzeugt. Tabelle 9.2 vergleicht kurz die beiden Ansätze.<br />
(0)x VS<br />
soll<br />
e x<br />
PBVS<br />
(0)v VS<br />
soll<br />
⎡ ⎤<br />
v x<br />
v y<br />
v z<br />
⎢ω x<br />
⎥<br />
⎣ω ⎦ y<br />
ω z<br />
Manipulator-<br />
Regler<br />
q, ˙q, i<br />
i soll<br />
Gelenke, Ströme<br />
Bild 9.45 PBVS<br />
Blockschaltbild<br />
(0)ˆx VS<br />
Positionsschätzung<br />
I<br />
’Bildstrom’

