

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
9.6 Inertiale Stabilisierung einer Lastkarre mit Momentenkreiseln lxi<br />
In Matrixdarstellung lauten die Systembeschreibung mit der Systemmatrix A und dem Steuervektor<br />
b<br />
⎡ ⎤ ⎡<br />
˙ψ<br />
¨ψ<br />
ẋ = ⎢ ⎥<br />
⎣ ˙ϕ P ⎦ = ⎢<br />
⎣<br />
¨ϕ P<br />
⎤⎡<br />
⎤ ⎡<br />
0 1 0 0 ψ<br />
m G g l P<br />
J<br />
− d 2 J<br />
P J<br />
0 G ω<br />
P J P<br />
˙ψ<br />
⎥⎢<br />
⎥+<br />
⎢<br />
0 0 0 1 ⎦⎣ϕ P ⎦ ⎣<br />
0 0 0 − 1 ˙ϕ<br />
T P<br />
} {{ 1<br />
}} {{ }<br />
A<br />
x<br />
wofür man nun einen Zustandsregler<br />
⎤<br />
0<br />
0<br />
⎥<br />
0 ⎦<br />
1<br />
T 1<br />
} {{ }<br />
b<br />
ω soll<br />
P<br />
}{{}<br />
u<br />
, (9.89)<br />
u= ω soll<br />
P<br />
=−k T x , (9.90)<br />
z. B. per Polzuweisung (Abschnitt 8.3) oder mittels Optimierung eines quadratischen Gütemaßes<br />
(Abschnitt 8.4.1) entwerfen kann. Hier ist kein Beobachter erforderlich, da alle Zustände<br />
vorliegen. Der Nickwinkel ψ und die Nickrate ˙ψ kommen direkt aus der IMU M6-LT, die ihrerseits<br />
intern ein Extended KALMAN-Filter implementiert. Den Präzessionswinkel ϕ P erfasst ein<br />
HALL-Encoder mit 14 Bit Auflösung hinreichend genau und die Präzessionsgeschwindigkeit<br />
˙ϕ P folgt aus einer numerischen Differentiation.<br />
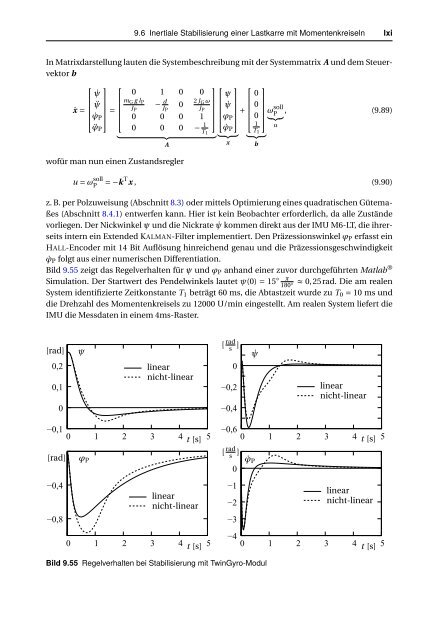
Bild 9.55 zeigt das Regelverhalten für ψ und ϕ P anhand einer zuvor durchgeführten Matlab ®<br />
Simulation. Der Startwert des Pendelwinkels lautet ψ(0) = 15 ◦ π<br />
180 ◦ ≈ 0,25rad. Die am realen<br />
System identifizierte Zeitkonstante T 1 beträgt 60 ms, die Abtastzeit wurde zu T 0 = 10 ms und<br />
die Drehzahl des Momentenkreisels zu 12000 U/min eingestellt. Am realen System liefert die<br />
IMU die Messdaten in einem 4ms-Raster.<br />
[rad]<br />
ψ<br />
[ rad<br />
s ] ˙ψ<br />
0,2<br />
0,1<br />
0<br />
linear<br />
nicht-linear<br />
0<br />
−0,2<br />
−0,4<br />
linear<br />
nicht-linear<br />
−0,1<br />
0<br />
[rad]<br />
ϕ P<br />
1<br />
2<br />
3<br />
4 t [s]<br />
5<br />
−0,6<br />
0<br />
[ rad<br />
0<br />
˙ϕ P<br />
1<br />
2<br />
3<br />
4<br />
t [s]<br />
5<br />
s ]<br />
t [s]<br />
−0,4<br />
−0,8<br />
linear<br />
nicht-linear<br />
−1<br />
−2<br />
−3<br />
linear<br />
nicht-linear<br />
0<br />
1<br />
2<br />
3<br />
4<br />
t [s]<br />
5<br />
−4<br />
0<br />
1<br />
2<br />
3<br />
4<br />
5<br />
Bild 9.55 Regelverhalten bei Stabilisierung mit TwinGyro-Modul

