

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
xx<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
Die in Bild 9.19 dargestellte konventionelle Regelungstopologie benötigt zahlreiche Parameter,<br />
die von der Getriebeübersetzung und von verschiedenen Betriebspunkten des Motors abhängig<br />
sind, so dass daraus ein erheblicher Parametrierungsaufwand resultiert. Um hohen Komfort<br />
dennoch mit einem sportlichen Beschleunigungsvermögen zu verbinden, erfordert die<br />
Applikation dieser Struktur zahlreiche zeitaufwendige Testfahrten zur Lösung jenes Zielkonflikts.<br />
Aufgrund weiter steigender Anforderungen an das Fahrverhalten, kurzfristigen Änderungen<br />
von Antriebsstrangkomponenten im Entwicklungsprozess sowie zunehmender Variantenvielfalt<br />
stößt diese Art der Fahrverhaltensapplikation an ihre Grenzen. Hinzu kommen<br />
stetig weitere Funktionen, um den Verbrauch und die Emissionen von Verbrennungsmotoren<br />
zu senken und somit die gesetzlichen Vorgaben einzuhalten. Der Aufwand für die Parametrierung<br />
von Regelungen im Steuergerät muss daher dauerhaft reduziert werden, damit bei<br />
steigender Zahl von Funktionalitäten die Applikation beherrschbar bleibt. Modellbasierte Regelungsansätze<br />
besitzen hierfür das notwendige Potential und helfen so, Zeit und Kosten zu<br />
sparen [Sch10]. Zudem verlagern sie einen Teil der Arbeit vom Fahrzeug an den Schreibtisch,<br />
wodurch Testzeiten reduziert werden können. Darüber hinaus bietet ein Beobachteransatz<br />
(vgl. Abschnitt 8.3.2) die Möglichkeit, frühzeitig auf radseitige Größen zuzugreifen und in die<br />
Regelungsstruktur einzubinden.<br />
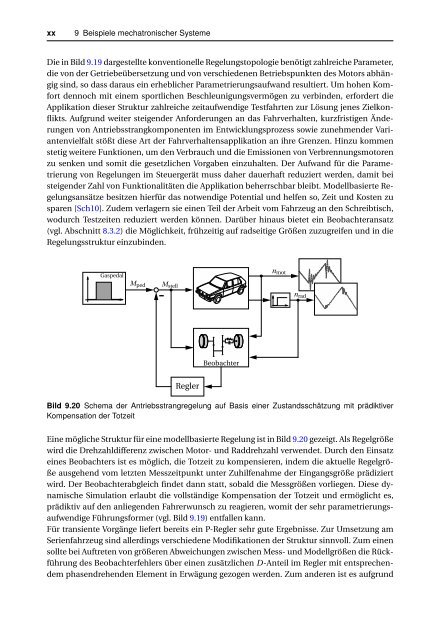
Bild 9.20 Schema der Antriebsstrangregelung auf Basis einer Zustandsschätzung mit prädiktiver<br />
Kompensation der Totzeit<br />
Eine mögliche Struktur für eine modellbasierte Regelung ist in Bild 9.20 gezeigt. Als Regelgröße<br />
wird die Drehzahldifferenz zwischen Motor- und Raddrehzahl verwendet. Durch den Einsatz<br />
eines Beobachters ist es möglich, die Totzeit zu kompensieren, indem die aktuelle Regelgröße<br />
ausgehend vom letzten Messzeitpunkt unter Zuhilfenahme der Eingangsgröße prädiziert<br />
wird. Der Beobachterabgleich findet dann statt, sobald die Messgrößen vorliegen. Diese dynamische<br />
Simulation erlaubt die vollständige Kompensation der Totzeit und ermöglicht es,<br />
prädiktiv auf den anliegenden Fahrerwunsch zu reagieren, womit der sehr parametrierungsaufwendige<br />
Führungsformer (vgl. Bild 9.19) entfallen kann.<br />
Für transiente Vorgänge liefert bereits ein P-Regler sehr gute Ergebnisse. Zur Umsetzung am<br />
Serienfahrzeug sind allerdings verschiedene Modifikationen der Struktur sinnvoll. Zum einen<br />
sollte bei Auftreten von größeren Abweichungen zwischen Mess- und Modellgrößen die Rückführung<br />
des Beobachterfehlers über einen zusätzlichen D-Anteil im Regler mit entsprechendem<br />
phasendrehenden Element in Erwägung gezogen werden. Zum anderen ist es aufgrund

