

Beispiele mechatronischer Systeme

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
9.6 Inertiale Stabilisierung einer Lastkarre mit Momentenkreiseln lix<br />
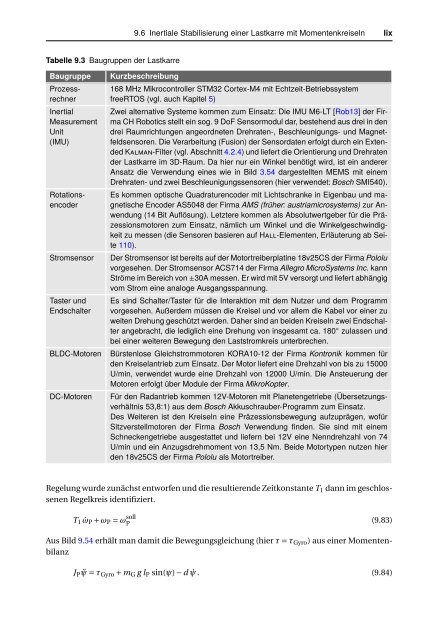
Tabelle 9.3 Baugruppen der Lastkarre<br />
Baugruppe<br />
Prozessrechner<br />
Inertial<br />
Measurement<br />
Unit<br />
(IMU)<br />
Rotationsencoder<br />
Stromsensor<br />
Taster und<br />
Endschalter<br />
BLDC-Motoren<br />
DC-Motoren<br />
Kurzbeschreibung<br />
168 MHz Mikrocontroller STM32 Cortex-M4 mit Echtzeit-Betriebssystem<br />
freeRTOS (vgl. auch Kapitel 5)<br />
Zwei alternative <strong>Systeme</strong> kommen zum Einsatz: Die IMU M6-LT [Rob13] der Firma<br />
CH Robotics stellt ein sog. 9 DoF Sensormodul dar, bestehend aus drei in den<br />
drei Raumrichtungen angeordneten Drehraten-, Beschleunigungs- und Magnetfeldsensoren.<br />
Die Verarbeitung (Fusion) der Sensordaten erfolgt durch ein Extended<br />
Kalman-Filter (vgl. Abschnitt 4.2.4) und liefert die Orientierung und Drehraten<br />
der Lastkarre im 3D-Raum. Da hier nur ein Winkel benötigt wird, ist ein anderer<br />
Ansatz die Verwendung eines wie in Bild 3.54 dargestellten MEMS mit einem<br />
Drehraten- und zwei Beschleunigungssensoren (hier verwendet: Bosch SMI540).<br />
Es kommen optische Quadraturencoder mit Lichtschranke in Eigenbau und magnetische<br />
Encoder AS5048 der Firma AMS (früher: austriamicrosystems) zur Anwendung<br />
(14 Bit Auflösung). Letztere kommen als Absolutwertgeber für die Präzessionsmotoren<br />
zum Einsatz, nämlich um Winkel und die Winkelgeschwindigkeit<br />
zu messen (die Sensoren basieren auf Hall-Elementen, Erläuterung ab Seite<br />
110).<br />
Der Stromsensor ist bereits auf der Motortreiberplatine 18v25CS der Firma Pololu<br />
vorgesehen. Der Stromsensor ACS714 der Firma Allegro MicroSystems Inc. kann<br />
Ströme im Bereich von±30A messen. Er wird mit 5V versorgt und liefert abhängig<br />
vom Strom eine analoge Ausgangsspannung.<br />
Es sind Schalter/Taster für die Interaktion mit dem Nutzer und dem Programm<br />
vorgesehen. Außerdem müssen die Kreisel und vor allem die Kabel vor einer zu<br />
weiten Drehung geschützt werden. Daher sind an beiden Kreiseln zwei Endschalter<br />
angebracht, die lediglich eine Drehung von insgesamt ca. 180 ◦ zulassen und<br />
bei einer weiteren Bewegung den Laststromkreis unterbrechen.<br />
Bürstenlose Gleichstrommotoren KORA10-12 der Firma Kontronik kommen für<br />
den Kreiselantrieb zum Einsatz. Der Motor liefert eine Drehzahl von bis zu 15000<br />
U/min, verwendet wurde eine Drehzahl von 12000 U/min. Die Ansteuerung der<br />
Motoren erfolgt über Module der Firma MikroKopter.<br />
Für den Radantrieb kommen 12V-Motoren mit Planetengetriebe (Übersetzungsverhältnis<br />
53,8:1) aus dem Bosch Akkuschrauber-Programm zum Einsatz.<br />
Des Weiteren ist den Kreiseln eine Präzessionsbewegung aufzuprägen, wofür<br />
Sitzverstellmotoren der Firma Bosch Verwendung finden. Sie sind mit einem<br />
Schneckengetriebe ausgestattet und liefern bei 12V eine Nenndrehzahl von 74<br />
U/min und ein Anzugsdrehmoment von 13,5 Nm. Beide Motortypen nutzen hier<br />
den 18v25CS der Firma Pololu als Motortreiber.<br />
Regelung wurde zunächst entworfen und die resultierende Zeitkonstante T 1 dann im geschlossenen<br />
Regelkreis identifiziert.<br />
T 1 ˙ω P + ω P = ω soll<br />
P<br />
(9.83)<br />
Aus Bild 9.54 erhält man damit die Bewegungsgleichung (hier τ=τ Gyro ) aus einer Momentenbilanz<br />
J P ¨ψ=τ Gyro + m G g l P sin(ψ)−d ˙ψ. (9.84)

