

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
9.6 Inertiale Stabilisierung einer Lastkarre mit Momentenkreiseln lvii<br />
sich nämlich der Vektor L parallel zum Vektor ω P einzustellen. Die Achse des Kreisels wird also<br />
hinten nach unten und vorne nach oben gedrückt, was die in Bild 9.50 eingezeichneten (und<br />
nicht unerheblichen) Lagerkräfte F L hervorruft.<br />
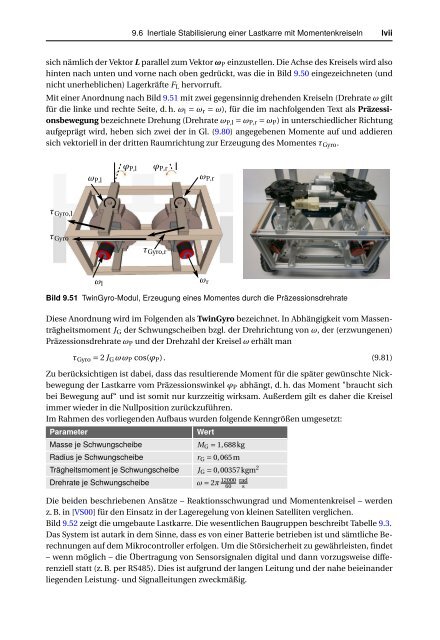
Mit einer Anordnung nach Bild 9.51 mit zwei gegensinnig drehenden Kreiseln (Drehrate ω gilt<br />
für die linke und rechte Seite, d. h. ω l = ω r = ω), für die im nachfolgenden Text als Präzessionsbewegung<br />
bezeichnete Drehung (Drehrate ω P,l = ω P,r = ω P ) in unterschiedlicher Richtung<br />
aufgeprägt wird, heben sich zwei der in Gl. (9.80) angegebenen Momente auf und addieren<br />
sich vektoriell in der dritten Raumrichtung zur Erzeugung des Momentes τ Gyro .<br />
ω P,l<br />
ϕ P,l ϕ P,r<br />
ω P,r<br />
τ Gyro,l<br />
τ Gyro<br />
τ Gyro,r<br />
ω l<br />
ω r<br />
Bild 9.51 TwinGyro-Modul, Erzeugung eines Momentes durch die Präzessionsdrehrate<br />
Diese Anordnung wird im Folgenden als TwinGyro bezeichnet. In Abhängigkeit vom Massenträgheitsmoment<br />
J G der Schwungscheiben bzgl. der Drehrichtung von ω, der (erzwungenen)<br />
Präzessionsdrehrate ω P und der Drehzahl der Kreisel ω erhält man<br />
τ Gyro = 2 J G ωω P cos(ϕ P ). (9.81)<br />
Zu berücksichtigen ist dabei, dass das resultierende Moment für die später gewünschte Nickbewegung<br />
der Lastkarre vom Präzessionswinkel ϕ P abhängt, d. h. das Moment "braucht sich<br />
bei Bewegung auf“ und ist somit nur kurzzeitig wirksam. Außerdem gilt es daher die Kreisel<br />
immer wieder in die Nullposition zurückzuführen.<br />
Im Rahmen des vorliegenden Aufbaus wurden folgende Kenngrößen umgesetzt:<br />
Parameter<br />
Masse je Schwungscheibe<br />
Wert<br />
M G = 1,688kg<br />
Radius je Schwungscheibe r G = 0,065m<br />
Trägheitsmoment je Schwungscheibe J G = 0,00357kgm 2<br />
Drehrate je Schwungscheibe ω=2π 12000<br />
60<br />
Die beiden beschriebenen Ansätze – Reaktionsschwungrad und Momentenkreisel – werden<br />
z. B. in [VS00] für den Einsatz in der Lageregelung von kleinen Satelliten verglichen.<br />
Bild 9.52 zeigt die umgebaute Lastkarre. Die wesentlichen Baugruppen beschreibt Tabelle 9.3.<br />
Das System ist autark in dem Sinne, dass es von einer Batterie betrieben ist und sämtliche Berechnungen<br />
auf dem Mikrocontroller erfolgen. Um die Störsicherheit zu gewährleisten, findet<br />
– wenn möglich – die Übertragung von Sensorsignalen digital und dann vorzugsweise differenziell<br />
statt (z. B. per RS485). Dies ist aufgrund der langen Leitung und der nahe beieinander<br />
liegenden Leistung- und Signalleitungen zweckmäßig.<br />
rad<br />
s

