

Beispiele mechatronischer Systeme

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
iv<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
a)<br />
Schlitten<br />
b)<br />
elek. Strecke<br />
und Regler<br />
1<br />
T S s+1<br />
T S = R T N,S<br />
K S<br />
mg r<br />
mech.<br />
Strecke<br />
1<br />
J s 2 +d s<br />
Drehzahlfilter<br />
s<br />
T F s+1<br />
Istposition<br />
Riementrieb<br />
Motor<br />
Drehzahlregler<br />
( )<br />
K G 1+ 1 1<br />
T N,G s<br />
Vorsteuerung<br />
J<br />
k M<br />
s<br />
T 1 s+1<br />
Positionsregler<br />
K P<br />
s<br />
T 1 s+1<br />
Sollposition<br />
Differenzierer<br />
Differenzierer<br />
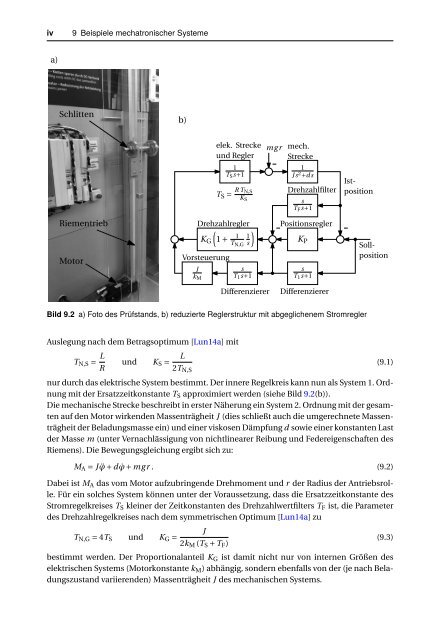
Bild 9.2 a) Foto des Prüfstands, b) reduzierte Reglerstruktur mit abgeglichenem Stromregler<br />
Auslegung nach dem Betragsoptimum [Lun14a] mit<br />
T N,S = L R<br />
und<br />
K S = L<br />
2T N,S<br />
(9.1)<br />
nur durch das elektrische System bestimmt. Der innere Regelkreis kann nun als System 1. Ordnung<br />
mit der Ersatzzeitkonstante T S approximiert werden (siehe Bild 9.2(b)).<br />
Die mechanische Strecke beschreibt in erster Näherung ein System 2. Ordnung mit der gesamten<br />
auf den Motor wirkenden Massenträgheit J (dies schließt auch die umgerechnete Massenträgheit<br />
der Beladungsmasse ein) und einer viskosen Dämpfung d sowie einer konstanten Last<br />
der Masse m (unter Vernachlässigung von nichtlinearer Reibung und Federeigenschaften des<br />
Riemens). Die Bewegungsgleichung ergibt sich zu:<br />
M A = J ¨ϕ+d ˙ϕ+mg r . (9.2)<br />
Dabei ist M A das vom Motor aufzubringende Drehmoment und r der Radius der Antriebsrolle.<br />
Für ein solches System können unter der Voraussetzung, dass die Ersatzzeitkonstante des<br />
Stromregelkreises T S kleiner der Zeitkonstanten des Drehzahlwertfilters T F ist, die Parameter<br />
des Drehzahlregelkreises nach dem symmetrischen Optimum [Lun14a] zu<br />
J<br />
T N,G = 4T S und K G =<br />
2k M (T S + T F )<br />
bestimmt werden. Der Proportionalanteil K G ist damit nicht nur von internen Größen des<br />
elektrischen Systems (Motorkonstante k M ) abhängig, sondern ebenfalls von der (je nach Beladungszustand<br />
variierenden) Massenträgheit J des mechanischen Systems.<br />
(9.3)

