

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
9.1 Auto-Tuning eines elektromechanischen Systems mittels EKF ix<br />
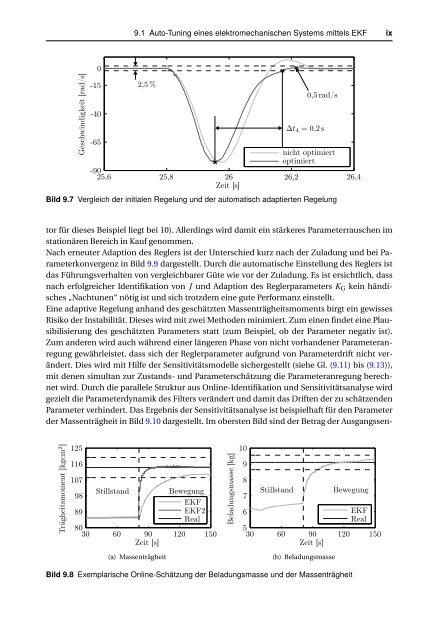
Bild 9.7 Vergleich der initialen Regelung und der automatisch adaptierten Regelung<br />
tor für dieses Beispiel liegt bei 10). Allerdings wird damit ein stärkeres Parameterrauschen im<br />
stationären Bereich in Kauf genommen.<br />
Nach erneuter Adaption des Reglers ist der Unterschied kurz nach der Zuladung und bei Parameterkonvergenz<br />
in Bild 9.9 dargestellt. Durch die automatische Einstellung des Reglers ist<br />
das Führungsverhalten von vergleichbarer Güte wie vor der Zuladung. Es ist ersichtlich, dass<br />
nach erfolgreicher Identifikation von J und Adaption des Reglerparameters K G kein händisches<br />
„Nachtunen“ nötig ist und sich trotzdem eine gute Performanz einstellt.<br />
Eine adaptive Regelung anhand des geschätzten Massenträgheitsmoments birgt ein gewisses<br />
Risiko der Instabilität. Dieses wird mit zwei Methoden minimiert. Zum einen findet eine Plausibilisierung<br />
des geschätzten Parameters statt (zum Beispiel, ob der Parameter negativ ist).<br />
Zum anderen wird auch während einer längeren Phase von nicht vorhandener Parameteranregung<br />
gewährleistet, dass sich der Reglerparameter aufgrund von Parameterdrift nicht verändert.<br />
Dies wird mit Hilfe der Sensitivitätsmodelle sichergestellt (siehe Gl. (9.11) bis (9.13)),<br />
mit denen simultan zur Zustands- und Parameterschätzung die Parameteranregung berechnet<br />
wird. Durch die parallele Struktur aus Online-Identifikation und Sensitivitätsanalyse wird<br />
gezielt die Parameterdynamik des Filters verändert und damit das Driften der zu schätzenden<br />
Parameter verhindert. Das Ergebnis der Sensitivitätsanalyse ist beispielhaft für den Parameter<br />
der Massenträgheit in Bild 9.10 dargestellt. Im obersten Bild sind der Betrag der Ausgangssen-<br />
Trägheitsmoment [kgcm 2 ]<br />
125<br />
116<br />
107<br />
98<br />
Stillstand Bewegung<br />
EKF<br />
89<br />
EKF2<br />
Real<br />
80<br />
30 60 90 120 150<br />
Zeit [s]<br />
(a) Massenträgheit<br />
Beladungsmasse [kg]<br />
10<br />
9<br />
8<br />
7<br />
Stillstand<br />
Bewegung<br />
6<br />
EKF<br />
Real<br />
5<br />
30 60 90 120 150<br />
Zeit [s]<br />
(b) Beladungsmasse<br />
Bild 9.8 Exemplarische Online-Schätzung der Beladungsmasse und der Massenträgheit

