

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
9.4 Deltaroboter mit PLCopen Funktionsbausteinen xxxvii<br />
entsprechende Funktionsbausteine zur Verfügung stellen. Nachstehend ist die Herleitung der<br />
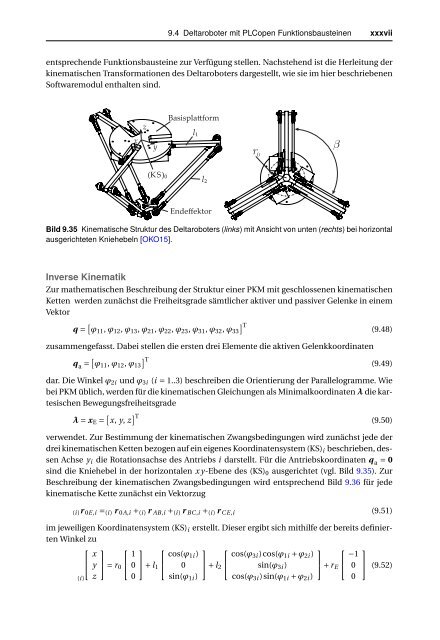
kinematischen Transformationen des Deltaroboters dargestellt, wie sie im hier beschriebenen<br />
Softwaremodul enthalten sind.<br />
x<br />
z<br />
y<br />
Basispla form<br />
l₁<br />
r 0<br />
<br />
(KS)₀<br />
l₂<br />
Endeffektor<br />
Bild 9.35 Kinematische Struktur des Deltaroboters (links) mit Ansicht von unten (rechts) bei horizontal<br />
ausgerichteten Kniehebeln [OKO15].<br />
Inverse Kinematik<br />
Zur mathematischen Beschreibung der Struktur einer PKM mit geschlossenen kinematischen<br />
Ketten werden zunächst die Freiheitsgrade sämtlicher aktiver und passiver Gelenke in einem<br />
Vektor<br />
q = [ ϕ 11 , ϕ 12 , ϕ 13 , ϕ 21 , ϕ 22 , ϕ 23 , ϕ 31 , ϕ 32 , ϕ 33<br />
] T<br />
(9.48)<br />
zusammengefasst. Dabei stellen die ersten drei Elemente die aktiven Gelenkkoordinaten<br />
q a = [ ϕ 11 , ϕ 12 , ϕ 13<br />
] T<br />
(9.49)<br />
dar. Die Winkel ϕ 2i und ϕ 3i (i = 1..3) beschreiben die Orientierung der Parallelogramme. Wie<br />
bei PKM üblich, werden für die kinematischen Gleichungen als Minimalkoordinaten λ die kartesischen<br />
Bewegungsfreiheitsgrade<br />
λ= x E = [ x, y, z ] T<br />
(9.50)<br />
verwendet. Zur Bestimmung der kinematischen Zwangsbedingungen wird zunächst jede der<br />
drei kinematischen Ketten bezogen auf ein eigenes Koordinatensystem (KS) i beschrieben, dessen<br />
Achse y i die Rotationsachse des Antriebs i darstellt. Für die Antriebskoordinaten q a = 0<br />
sind die Kniehebel in der horizontalen x y-Ebene des (KS) 0 ausgerichtet (vgl. Bild 9.35). Zur<br />
Beschreibung der kinematischen Zwangsbedingungen wird entsprechend Bild 9.36 für jede<br />
kinematische Kette zunächst ein Vektorzug<br />
(i )r 0E ,i = (i ) r 0A,i + (i ) r AB,i + (i ) r BC ,i + (i ) r C E ,i (9.51)<br />
im jeweiligen Koordinatensystem (KS) i erstellt. Dieser ergibt sich mithilfe der bereits definierten<br />
Winkel zu<br />
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤<br />
x 1 cos(ϕ 1i ) cos(ϕ 3i )cos(ϕ 1i + ϕ 2i ) −1<br />
⎣ y ⎦=r 0<br />
⎣ 0 ⎦+l 1<br />
⎣ 0 ⎦+l 2<br />
⎣ sin(ϕ 3i ) ⎦+r E<br />
⎣ 0 ⎦ (9.52)<br />
z 0 sin(ϕ 1i ) cos(ϕ 3i )sin(ϕ 1i + ϕ 2i )<br />
0<br />
(i )

