

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
ii<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
Stromregler<br />
( )<br />
K S 1+ 1 1<br />
T N,S s<br />
elek.<br />
Strecke<br />
1<br />
Ls+R<br />
mech.<br />
Strecke<br />
1<br />
J s 2 +d s<br />
Drehzahlfilter<br />
s<br />
T F s+1<br />
Istposition<br />
Drehzahlregler<br />
( )<br />
K G 1+ 1 1<br />
T N,G s<br />
Vorsteuerung<br />
J<br />
k M<br />
Differenzierer<br />
s<br />
T 1 s+1<br />
Positionsregler<br />
K P<br />
Differenzierer<br />
s<br />
T 1 s+1<br />
Sollposition<br />
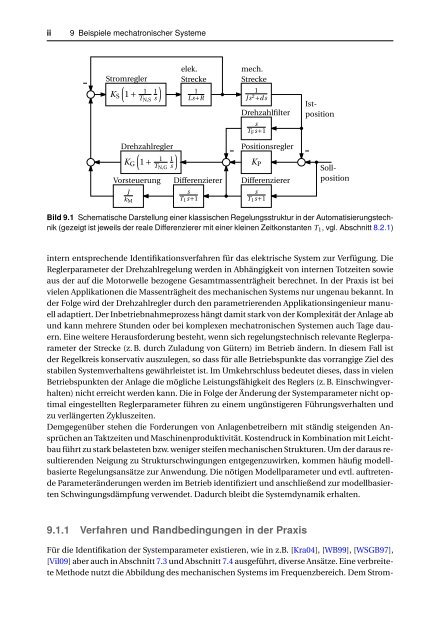
Bild 9.1 Schematische Darstellung einer klassischen Regelungsstruktur in der Automatisierungstechnik<br />
(gezeigt ist jeweils der reale Differenzierer mit einer kleinen Zeitkonstanten T 1 , vgl. Abschnitt 8.2.1)<br />
intern entsprechende Identifikationsverfahren für das elektrische System zur Verfügung. Die<br />
Reglerparameter der Drehzahlregelung werden in Abhängigkeit von internen Totzeiten sowie<br />
aus der auf die Motorwelle bezogene Gesamtmassenträgheit berechnet. In der Praxis ist bei<br />
vielen Applikationen die Massenträgheit des mechanischen Systems nur ungenau bekannt. In<br />
der Folge wird der Drehzahlregler durch den parametrierenden Applikationsingenieur manuell<br />
adaptiert. Der Inbetriebnahmeprozess hängt damit stark von der Komplexität der Anlage ab<br />
und kann mehrere Stunden oder bei komplexen mechatronischen <strong>Systeme</strong>n auch Tage dauern.<br />
Eine weitere Herausforderung besteht, wenn sich regelungstechnisch relevante Reglerparameter<br />
der Strecke (z. B. durch Zuladung von Gütern) im Betrieb ändern. In diesem Fall ist<br />
der Regelkreis konservativ auszulegen, so dass für alle Betriebspunkte das vorrangige Ziel des<br />
stabilen Systemverhaltens gewährleistet ist. Im Umkehrschluss bedeutet dieses, dass in vielen<br />
Betriebspunkten der Anlage die mögliche Leistungsfähigkeit des Reglers (z. B. Einschwingverhalten)<br />
nicht erreicht werden kann. Die in Folge der Änderung der Systemparameter nicht optimal<br />
eingestellten Reglerparameter führen zu einem ungünstigeren Führungsverhalten und<br />
zu verlängerten Zykluszeiten.<br />
Demgegenüber stehen die Forderungen von Anlagenbetreibern mit ständig steigenden Ansprüchen<br />
an Taktzeiten und Maschinenproduktivität. Kostendruck in Kombination mit Leichtbau<br />
führt zu stark belasteten bzw. weniger steifen mechanischen Strukturen. Um der daraus resultierenden<br />
Neigung zu Strukturschwingungen entgegenzuwirken, kommen häufig modellbasierte<br />
Regelungsansätze zur Anwendung. Die nötigen Modellparameter und evtl. auftretende<br />
Parameteränderungen werden im Betrieb identifiziert und anschließend zur modellbasierten<br />
Schwingungsdämpfung verwendet. Dadurch bleibt die Systemdynamik erhalten.<br />
9.1.1 Verfahren und Randbedingungen in der Praxis<br />
Für die Identifikation der Systemparameter existieren, wie in z.B. [Kra04], [WB99], [WSGB97],<br />
[Vil09] aber auch in Abschnitt 7.3 und Abschnitt 7.4 ausgeführt, diverse Ansätze. Eine verbreitete<br />
Methode nutzt die Abbildung des mechanischen Systems im Frequenzbereich. Dem Strom-

