

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
lvi<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
9.6.1 Systembeschreibung Lastkarre mit TwinGyro-Modul<br />
Bei Kraftassistenzsystemen sind Kräfte und/oder Momente gezielt in ein System einzuleiten.<br />
In diesem Beitrag stehen Momente im Vordergrund, wozu zwei typische Ansätze kurz erläutert<br />
werden (vgl. Bild 9.50):<br />
Die erste Möglichkeit besteht darin, starr gelagerte Schwungräder gezielt zu beschleunigen<br />
/ verzögern und die erzeugten Reaktionsmomente (aufgrund des Drehimpulsatzes, vgl. Abschnitt<br />
6.2.1) zu nutzen. Man nennt solche <strong>Systeme</strong> Reaktionsschwungräder bzw. engl. reaction<br />
wheels. Das erzeugte Moment τ entspricht der zeitlichen Ableitung des Drehimpulses L:<br />
˙L= τ. (9.78)<br />
Die zweite Möglichkeit besteht in aufgehängten bzw. gezielt bewegten Kreiseln und die Nutzung<br />
der Kreiselmomente (z. B. durch die sog. erzwungene Präzession). Diese <strong>Systeme</strong> bezeichnet<br />
man als Momentenkreisel (engl. Control Moment Gyros = CMG).<br />
ω P<br />
τ<br />
ω<br />
ω<br />
F L<br />
F L<br />
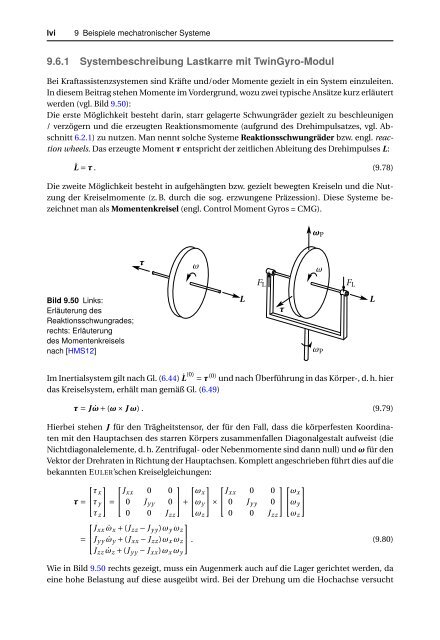
Bild 9.50 Links:<br />
Erläuterung des<br />
Reaktionsschwungrades;<br />
rechts: Erläuterung<br />
des Momentenkreisels<br />
nach [HMS12]<br />
L<br />
τ<br />
ω P<br />
L<br />
Im Inertialsystem gilt nach Gl. (6.44) ˙L (0) = τ (0) und nach Überführung in das Körper-, d. h. hier<br />
das Kreiselsystem, erhält man gemäß Gl. (6.49)<br />
τ= J ˙ω+(ω× J ω) . (9.79)<br />
Hierbei stehen J für den Trägheitstensor, der für den Fall, dass die körperfesten Koordinaten<br />
mit den Hauptachsen des starren Körpers zusammenfallen Diagonalgestalt aufweist (die<br />
Nichtdiagonalelemente, d. h. Zentrifugal- oder Nebenmomente sind dann null) und ω für den<br />
Vektor der Drehraten in Richtung der Hauptachsen. Komplett angeschrieben führt dies auf die<br />
bekannten EULER’schen Kreiselgleichungen:<br />
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡<br />
⎤<br />
τ x J xx 0 0 ω x J xx 0 0 ω x<br />
τ= ⎣τ y<br />
⎦= ⎣ 0 J y y 0 ⎦+ ⎣ω y<br />
⎦× ⎣ 0 J y y 0 ⎦⎣ω y<br />
⎦<br />
τ z 0 0 J zz ω z 0 0 J zz ω z<br />
⎡<br />
⎤<br />
J xx ˙ω x + (J zz − J y y )ω y ω z<br />
= ⎣J y y ˙ω y + (J xx − J zz )ω x ω z<br />
⎦ . (9.80)<br />
J zz ˙ω z + (J y y − J xx )ω x ω y<br />
Wie in Bild 9.50 rechts gezeigt, muss ein Augenmerk auch auf die Lager gerichtet werden, da<br />
eine hohe Belastung auf diese ausgeübt wird. Bei der Drehung um die Hochachse versucht

