

Beispiele mechatronischer Systeme

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
9.2 Funktionsentwicklung und Applikation in der MSG-Entwicklung xix<br />
Moment [Nm]<br />
600<br />
500<br />
400<br />
300<br />
200<br />
100<br />
0<br />
−100<br />
−200<br />
2 2.4 2.8 3.2<br />
Zeit [s]<br />
Moment [Nm]<br />
300<br />
200<br />
100<br />
0<br />
−100<br />
−200<br />
−300<br />
−400<br />
−500<br />
Messung<br />
Modell<br />
5.6 6 6.4 6.8<br />
Zeit [s]<br />
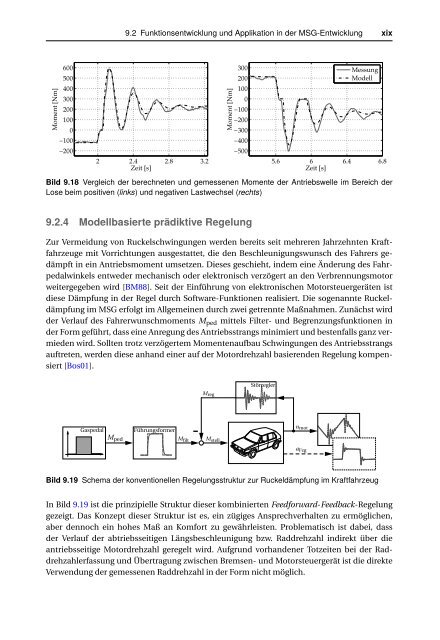
Bild 9.18 Vergleich der berechneten und gemessenen Momente der Antriebswelle im Bereich der<br />
Lose beim positiven (links) und negativen Lastwechsel (rechts)<br />
9.2.4 Modellbasierte prädiktive Regelung<br />
Zur Vermeidung von Ruckelschwingungen werden bereits seit mehreren Jahrzehnten Kraftfahrzeuge<br />
mit Vorrichtungen ausgestattet, die den Beschleunigungswunsch des Fahrers gedämpft<br />
in ein Antriebsmoment umsetzen. Dieses geschieht, indem eine Änderung des Fahrpedalwinkels<br />
entweder mechanisch oder elektronisch verzögert an den Verbrennungsmotor<br />
weitergegeben wird [BM88]. Seit der Einführung von elektronischen Motorsteuergeräten ist<br />
diese Dämpfung in der Regel durch Software-Funktionen realisiert. Die sogenannte Ruckeldämpfung<br />
im MSG erfolgt im Allgemeinen durch zwei getrennte Maßnahmen. Zunächst wird<br />
der Verlauf des Fahrerwunschmoments M ped mittels Filter- und Begrenzungsfunktionen in<br />
der Form geführt, dass eine Anregung des Antriebsstrangs minimiert und bestenfalls ganz vermieden<br />
wird. Sollten trotz verzögertem Momentenaufbau Schwingungen des Antriebsstrangs<br />
auftreten, werden diese anhand einer auf der Motordrehzahl basierenden Regelung kompensiert<br />
[Bos01].<br />
Bild 9.19 Schema der konventionellen Regelungsstruktur zur Ruckeldämpfung im Kraftfahrzeug<br />
In Bild 9.19 ist die prinzipielle Struktur dieser kombinierten Feedforward-Feedback-Regelung<br />
gezeigt. Das Konzept dieser Struktur ist es, ein zügiges Ansprechverhalten zu ermöglichen,<br />
aber dennoch ein hohes Maß an Komfort zu gewährleisten. Problematisch ist dabei, dass<br />
der Verlauf der abtriebsseitigen Längsbeschleunigung bzw. Raddrehzahl indirekt über die<br />
antriebsseitige Motordrehzahl geregelt wird. Aufgrund vorhandener Totzeiten bei der Raddrehzahlerfassung<br />
und Übertragung zwischen Bremsen- und Motorsteuergerät ist die direkte<br />
Verwendung der gemessenen Raddrehzahl in der Form nicht möglich.

