

Beispiele mechatronischer Systeme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
lviii<br />
9 <strong>Beispiele</strong> <strong>mechatronischer</strong> <strong>Systeme</strong><br />
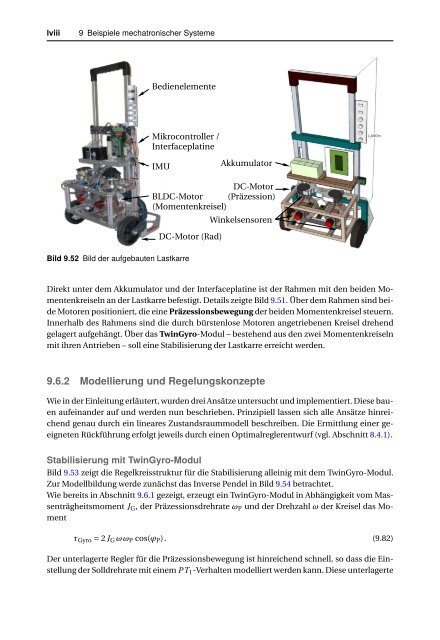
Bedienelemente<br />
Mikrocontroller /<br />
Interfaceplatine<br />
IMU<br />
Akkumulator<br />
Bild 9.52 Bild der aufgebauten Lastkarre<br />
DC-Motor<br />
BLDC-Motor (Präzession)<br />
(Momentenkreisel)<br />
DC-Motor (Rad)<br />
Winkelsensoren<br />
Direkt unter dem Akkumulator und der Interfaceplatine ist der Rahmen mit den beiden Momentenkreiseln<br />
an der Lastkarre befestigt. Details zeigte Bild 9.51. Über dem Rahmen sind beide<br />
Motoren positioniert, die eine Präzessionsbewegung der beiden Momentenkreisel steuern.<br />
Innerhalb des Rahmens sind die durch bürstenlose Motoren angetriebenen Kreisel drehend<br />
gelagert aufgehängt. Über das TwinGyro-Modul – bestehend aus den zwei Momentenkreiseln<br />
mit ihren Antrieben – soll eine Stabilisierung der Lastkarre erreicht werden.<br />
9.6.2 Modellierung und Regelungskonzepte<br />
Wie in der Einleitung erläutert, wurden drei Ansätze untersucht und implementiert. Diese bauen<br />
aufeinander auf und werden nun beschrieben. Prinzipiell lassen sich alle Ansätze hinreichend<br />
genau durch ein lineares Zustandsraummodell beschreiben. Die Ermittlung einer geeigneten<br />
Rückführung erfolgt jeweils durch einen Optimalreglerentwurf (vgl. Abschnitt 8.4.1).<br />
Stabilisierung mit TwinGyro-Modul<br />
Bild 9.53 zeigt die Regelkreisstruktur für die Stabilisierung alleinig mit dem TwinGyro-Modul.<br />
Zur Modellbildung werde zunächst das Inverse Pendel in Bild 9.54 betrachtet.<br />
Wie bereits in Abschnitt 9.6.1 gezeigt, erzeugt ein TwinGyro-Modul in Abhängigkeit vom Massenträgheitsmoment<br />
J G , der Präzessionsdrehrate ω P und der Drehzahl ω der Kreisel das Moment<br />
τ Gyro = 2 J G ωω P cos(ϕ P ). (9.82)<br />
Der unterlagerte Regler für die Präzessionsbewegung ist hinreichend schnell, so dass die Einstellung<br />
der Solldrehrate mit einem PT 1 -Verhalten modelliert werden kann. Diese unterlagerte

