Inbetriebnahme-Software DRIVE.EXE für ... - BIBUS SK, sro
Inbetriebnahme-Software DRIVE.EXE für ... - BIBUS SK, sro
Inbetriebnahme-Software DRIVE.EXE für ... - BIBUS SK, sro

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Bildschirmseite "Feedback" 07/03 Kollmorgen<br />
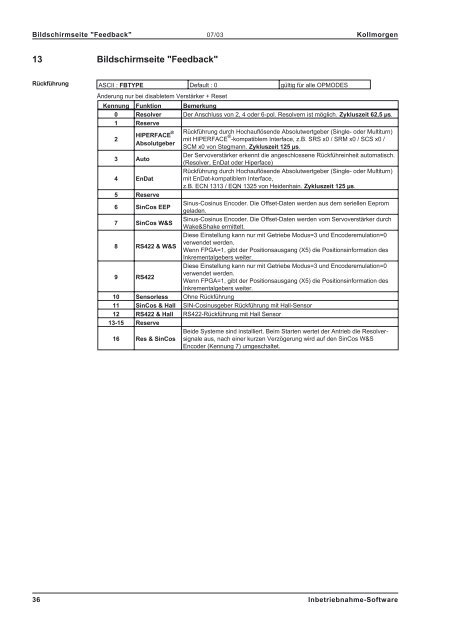
13 Bildschirmseite "Feedback"<br />
Rückführung ASCII : FBTYPE Default : 0 gültig <strong>für</strong> alle OPMODES<br />
Änderung nur bei disabletem Verstärker + Reset<br />
Kennung Funktion Bemerkung<br />
0 Resolver Der Anschluss von 2, 4 oder 6-pol. Resolvern ist möglich. Zykluszeit 62,5 µs.<br />
1 Reserve<br />
2<br />
HIPERFACE ®<br />
Absolutgeber<br />
Rückführung durch Hochauflösende Absolutwertgeber (Single- oder Multiturn)<br />
mit HIPERFACE ® -kompatiblem Interface, z.B. SRS x0 / SRM x0 / SCS x0 /<br />
SCM x0 von Stegmann. Zykluszeit 125 µs.<br />
3 Auto<br />
Der Servoverstärker erkennt die angeschlossene Rückführeinheit automatisch.<br />
(Resolver, EnDat oder Hiperface)<br />
Rückführung durch Hochauflösende Absolutwertgeber (Single- oder Multiturn)<br />
4 EnDat mit EnDat-kompatiblem Interface,<br />
z.B. ECN 1313 / EQN 1325 von Heidenhain. Zykluszeit 125 µs.<br />
5 Reserve<br />
6 SinCos EEP<br />
Sinus-Cosinus Encoder. Die Offset-Daten werden aus dem seriellen Eeprom<br />
geladen.<br />
7 SinCos W&S<br />
Sinus-Cosinus Encoder. Die Offset-Daten werden vom Servoverstärker durch<br />
Wake&Shake ermittelt.<br />
Diese Einstellung kann nur mit Getriebe Modus=3 und Encoderemulation=0<br />
8 RS422 & W&S<br />
verwendet werden.<br />
Wenn FPGA=1, gibt der Positionsausgang (X5) die Positionsinformation des<br />
Inkrementalgebers weiter.<br />
Diese Einstellung kann nur mit Getriebe Modus=3 und Encoderemulation=0<br />
9 RS422<br />
verwendet werden.<br />
Wenn FPGA=1, gibt der Positionsausgang (X5) die Positionsinformation des<br />
Inkrementalgebers weiter.<br />
10 Sensorless Ohne Rückführung<br />
11 SinCos & Hall SIN-Cosinusgeber Rückführung mit Hall-Sensor<br />
12 RS422 & Hall RS422-Rückführung mit Hall Sensor<br />
13-15 Reserve<br />
Beide Systeme sind installiert. Beim Starten wertet der Antrieb die Resolver-<br />
16 Res & SinCos signale aus, nach einer kurzen Verzögerung wird auf den SinCos W&S<br />
Encoder (Kennung 7) umgeschaltet.<br />
36 <strong>Inbetriebnahme</strong>-<strong>Software</strong>