Inbetriebnahme-Software DRIVE.EXE für ... - BIBUS SK, sro
Inbetriebnahme-Software DRIVE.EXE für ... - BIBUS SK, sro
Inbetriebnahme-Software DRIVE.EXE für ... - BIBUS SK, sro

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Bildschirmseite "Encoder" 07/03 Kollmorgen<br />
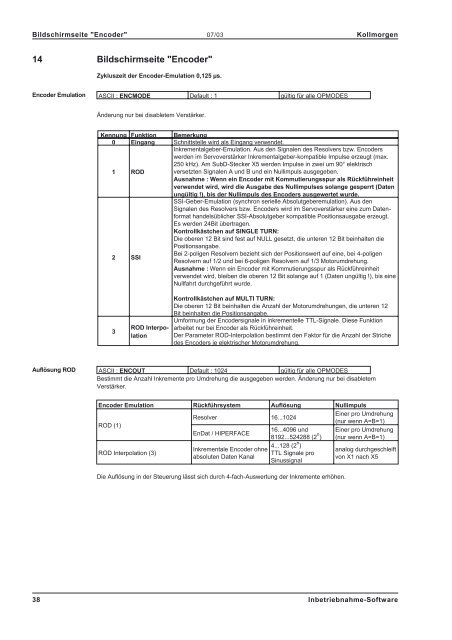
14 Bildschirmseite "Encoder"<br />
Zykluszeit der Encoder-Emulation 0,125 µs.<br />
Encoder Emulation ASCII : ENCMODE Default : 1 gültig <strong>für</strong> alle OPMODES<br />
Änderung nur bei disabletem Verstärker.<br />
Kennung Funktion Bemerkung<br />
0 Eingang Schnittstelle wird als Eingang verwendet.<br />
Inkrementalgeber-Emulation. Aus den Signalen des Resolvers bzw. Encoders<br />
werden im Servoverstärker Inkrementalgeber-kompatible Impulse erzeugt (max.<br />
250 kHz). Am SubD-Stecker X5 werden Impulse in zwei um 90° elektrisch<br />
1 ROD versetzten Signalen A und B und ein Nullimpuls ausgegeben.<br />
Ausnahme : Wenn ein Encoder mit Kommutierungsspur als Rückführeinheit<br />
verwendet wird, wird die Ausgabe des Nullimpulses solange gesperrt (Daten<br />
ungültig !), bis der Nullimpuls des Encoders ausgewertet wurde.<br />
SSI-Geber-Emulation (synchron serielle Absolutgeberemulation). Aus den<br />
Signalen des Resolvers bzw. Encoders wird im Servoverstärker eine zum Datenformat<br />
handelsüblicher SSI-Absolutgeber kompatible Positionsausgabe erzeugt.<br />
Es werden 24Bit übertragen.<br />
Kontrollkästchen auf SINGLE TURN:<br />
Die oberen 12 Bit sind fest auf NULL gesetzt, die unteren 12 Bit beinhalten die<br />
Positionsangabe.<br />
2 SSI<br />
Bei 2-poligen Resolvern bezieht sich der Positionswert auf eine, bei 4-poligen<br />
Resolvern auf 1/2 und bei 6-poligen Resolvern auf 1/3 Motorumdrehung.<br />
Ausnahme : Wenn ein Encoder mit Kommutierungsspur als Rückführeinheit<br />
verwendet wird, bleiben die oberen 12 Bit solange auf 1 (Daten ungültig !), bis eine<br />
Nullfahrt durchgeführt wurde.<br />
3<br />
ROD Interpolation<br />
Kontrollkästchen auf MULTI TURN:<br />
Die oberen 12 Bit beinhalten die Anzahl der Motorumdrehungen, die unteren 12<br />
Bit beinhalten die Positionsangabe.<br />
Umformung der Encodersignale in inkrementelle TTL-Signale. Diese Funktion<br />
arbeitet nur bei Encoder als Rückführeinheit.<br />
Der Parameter ROD-Interpolation bestimmt den Faktor <strong>für</strong> die Anzahl der Striche<br />
des Encoders je elektrischer Motorumdrehung.<br />
Auflösung ROD ASCII : ENCOUT Default : 1024 gültig <strong>für</strong> alle OPMODES<br />
Bestimmt die Anzahl Inkremente pro Umdrehung die ausgegeben werden. Änderung nur bei disabletem<br />
Verstärker.<br />
Encoder Emulation Rückführsystem Auflösung Nullimpuls<br />
ROD (1)<br />
Resolver<br />
EnDat / HIPERFACE<br />
16...1024<br />
16...4096 und<br />
8192...524288 (2<br />
Einer pro Umdrehung<br />
(nur wenn A=B=1)<br />
n )<br />
Einer pro Umdrehung<br />
(nur wenn A=B=1)<br />
ROD Interpolation (3)<br />
Inkrementale Encoder ohne<br />
absoluten Daten Kanal<br />
4...128 (2 n )<br />
TTL Signale pro<br />
Sinussignal<br />
analog durchgeschleift<br />
von X1 nach X5<br />
Die Auflösung in der Steuerung lässt sich durch 4-fach-Auswertung der Inkremente erhöhen.<br />
38 <strong>Inbetriebnahme</strong>-<strong>Software</strong>