

full Paper - Nguyen Dang Binh
full Paper - Nguyen Dang Binh
full Paper - Nguyen Dang Binh

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
formula, instead of a system of differential equations. The<br />
steering wheel simplified model calculates the torque τ at<br />
the steering wheel as a function of the vehicle longitudinal<br />
velocity Vx and the steering wheel angular displacement δw.<br />
The approach proposed in this section has been validated by<br />
experimental data collected for a FIAT PUNTO. The steering<br />
wheel torque can be split into different terms to clearly<br />
show the physical meaning of the equation:<br />
τ τi ¨ δw τ0 Ay τ1 Vx ˙ δw τ2 ˙ δw τ3 ˙ δw (1)<br />
The term τi is the inertial torque. Knowing the steering<br />
wheel moment of inertia Jw, the value of τi is:<br />
τi ¨ δw Jw ¨ δw (2)<br />
The term τ0 is the torque due to the vehicle lateral acceleration<br />
Ay, which has been derived from the linear timeinvariant<br />
bicycle model. However, since it is not correct to<br />
consider that the vehicle behaviour is linear in every condition,<br />
so the lateral acceleration of the bicycle model Ayb<br />
has been adjusted to fit with experimental data. The relation<br />
between the Ay and Ayb derived from the bicycle model is:<br />
Ay K ¡ max Ay ¡tan<br />
1 Ayb<br />
K0<br />
On the basis of equation 3, the expression of τ0 determined<br />
by interpolation of track data acquisition is:<br />
τ0 <br />
K1Ay<br />
1 K2A K3<br />
y<br />
The term τ1 is the torque due to the tire spin. The parameter<br />
that most influences this torque is the vehicle longitudinal<br />
velocity Vx. In order to have the torque sense and avoid discontinuity,<br />
the steering wheel angular velocity is also taken<br />
into account in the following equation:<br />
1<br />
τ1 <br />
K4 K5Vx<br />
¡tan 1 ˙ δw<br />
K6<br />
The term τ2 is the torque due to the friction present in all<br />
the steering system:<br />
τ2 K7 ¡tan 1 ˙ δw<br />
K8<br />
The term τ3 represents the damping contribute:<br />
τ3 K9 ˙ δw<br />
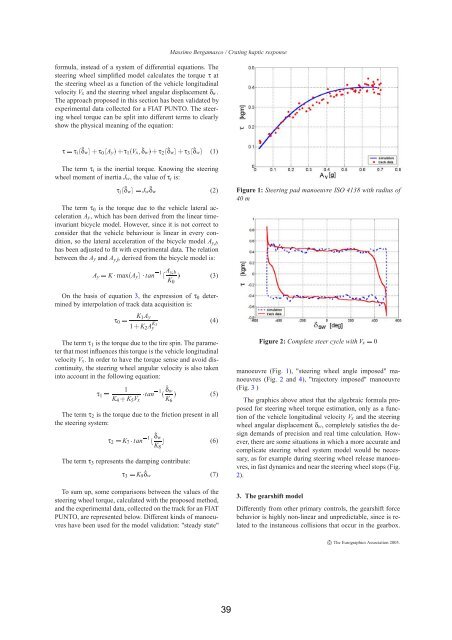
To sum up, some comparisons between the values of the<br />
steering wheel torque, calculated with the proposed method,<br />
and the experimental data, collected on the track for an FIAT<br />
PUNTO, are represented below. Different kinds of manoeuvres<br />
have been used for the model validation: "steady state"<br />
Massimo Bergamasco / Crating haptic response<br />
(3)<br />
(4)<br />
(5)<br />
(6)<br />
(7)<br />
39<br />
Figure 1: Steering pad manoeuvre ISO 4138 with radius of<br />
40 m<br />
Figure 2: Complete steer cycle with Vx 0<br />
manoeuvre (Fig. 1), "steering wheel angle imposed" manoeuvres<br />
(Fig. 2 and 4), "trajectory imposed" manoeuvre<br />
(Fig. 3 )<br />
The graphics above attest that the algebraic formula proposed<br />
for steering wheel torque estimation, only as a function<br />
of the vehicle longitudinal velocity Vx and the steering<br />
wheel angular displacement δw, completely satisfies the design<br />
demands of precision and real time calculation. However,<br />
there are some situations in which a more accurate and<br />
complicate steering wheel system model would be necessary,<br />
as for example during steering wheel release manoeuvres,<br />
in fast dynamics and near the steering wheel stops (Fig.<br />
2).<br />
3. The gearshift model<br />
Differently from other primary controls, the gearshift force<br />
behavior is highly non-linear and unpredictable, since is related<br />
to the instaneous collisions that occur in the gearbox.<br />
c The Eurographics Association 2005.













