Inclination sensors
Inclination sensors
Inclination sensors
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
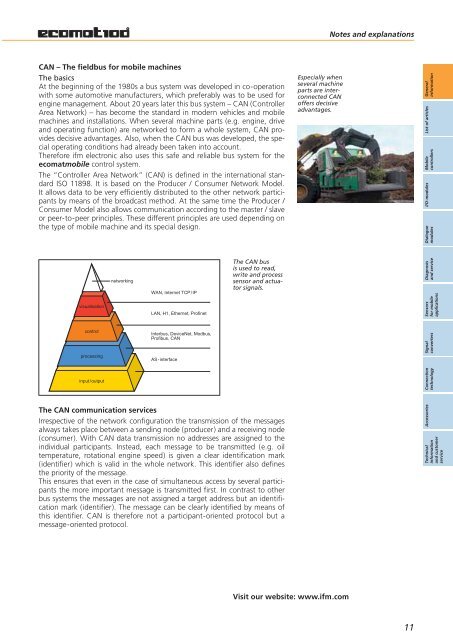
Notes and explanationsCAN – The fieldbus for mobile machinesThe basicsAt the beginning of the 1980s a bus system was developed in co-operationwith some automotive manufacturers, which preferably was to be used forengine management. About 20 years later this bus system – CAN (ControllerArea Network) – has become the standard in modern vehicles and mobilemachines and installations. When several machine parts (e.g. engine, driveand operating function) are networked to form a whole system, CAN providesdecisive advantages. Also, when the CAN bus was developed, the specialoperating conditions had already been taken into account.Therefore ifm electronic also uses this safe and reliable bus system for theecomatmobile control system.The “Controller Area Network” (CAN) is defined in the international standardISO 11898. It is based on the Producer / Consumer Network Model.It allows data to be very efficiently distributed to the other network participantsby means of the broadcast method. At the same time the Producer /Consumer Model also allows communication according to the master / slaveor peer-to-peer principles. These different principles are used depending onthe type of mobile machine and its special design.Especially whenseveral machineparts are interconnectedCANoffers decisiveadvantages.GeneralinformationList of articlesMobilecontrollersI/O-modulesDialoguemodulesvisualisationnetworkingWAN, Internet TCP/IPLAN, H1, Ethernet, ProfinetThe CAN busis used to read,write and processsensor and actuatorsignals.Diagnosisand serviceSensorsfor mobileapplicationscontrolprocessingInterbus, DeviceNet, Modbus,Profibus, CANAS-interfaceSignalconvertersinput/outputConnectiontechnologyThe CAN communication servicesIrrespective of the network configuration the transmission of the messagesalways takes place between a sending node (producer) and a receiving node(consumer). With CAN data transmission no addresses are assigned to theindividual participants. Instead, each message to be transmitted (e.g. oiltemperature, rotational engine speed) is given a clear identification mark(identifier) which is valid in the whole network. This identifier also definesthe priority of the message.This ensures that even in the case of simultaneous access by several participantsthe more important message is transmitted first. In contrast to otherbus systems the messages are not assigned a target address but an identificationmark (identifier). The message can be clearly identified by means ofthis identifier. CAN is therefore not a participant-oriented protocol but amessage-oriented protocol.AccessoriesTechnicalinformationand customerserviceVisit our website: www.ifm.com11