Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Wichtige Gleichungen der Antriebstechnik Engineering formulas<br />
Internationales System (SI)<br />
International System (SI)<br />
Arbeit / Work:<br />
W = F ⋅ s<br />
W = P ⋅ t<br />
W = T ⋅ Φ<br />
W<br />
W<br />
1<br />
--Jω<br />
2<br />
2<br />
=<br />
---------------<br />
1<br />
J n<br />
182, 5<br />
2<br />
= ⋅ ⋅<br />
Leistung / Power:<br />
Hub / Lifting motion:<br />
1 - 8<br />
Technisches Maßsystem (TM)<br />
Technical Measuring System (TM)<br />
Rotation / Rotary motion:<br />
1<br />
P = T ⋅ ω<br />
N = --------------- ⋅T ⋅ n<br />
0, 974<br />
1<br />
P = ------------ ⋅T ⋅ n<br />
9, 55<br />
Translation / Linear motion:<br />
Bremszeit / Braking time:<br />
1 J n<br />
t ------------<br />
9, 55<br />
⋅<br />
= ⋅ ----------<br />
T<br />
Massenträgheitsmoment / Mass moment of inertia:<br />
m = geradlinig bewegte Masse in kg<br />
v = Geschwindigkeit der Masse in m/s<br />
nmot = Motordrehzahl in min -1 .<br />
Schalthäufigkeit / Stop-start frequency:<br />
m = linear moved mass in kg<br />
v = velocity of the mass in m/s<br />
n mot = motor speed in min -1<br />
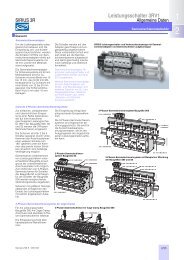
<strong>MOTOX</strong> ® -N<br />
Zo = Leerschalthäufigkeit in1/h<br />
Zs = zulässige Schalthäufigkeit in 1/h<br />
TL TH Jmot = Lastmoment in Nm<br />
= mittl. Hochlaufmoment des Motors in Nm<br />
= Massenträgheitsmoment des Motors in kgm 2<br />
Jzus = Massenträgheitsmoment der Last in kgm 2<br />
Zo = no-load stop-start frequence/hour<br />
Zs = permissible stop-start frequence/hour<br />
TL TH Jmot = torque load in Nm<br />
= mean running-up torque of the motor in Nm<br />
= Moment of inertia of the motor in kgm 2<br />
Jzus = Moment of inertia of the load in kgm 2<br />
1 – T ⁄ T<br />
L Hm<br />
Z = Z ⋅ ---------------------------------------s<br />
o 1 + J ⁄ J<br />
zus mot<br />
Z =<br />
s<br />
1 – T ⁄ T<br />
L Hm<br />
Z ⋅ ---------------------------------------o<br />
1 + J ⁄ J<br />
zus mot<br />
Drehstrommotor / Three phase motor:<br />
Leistungsaufnahme / Power input: Leistungsabgabe / Power output:<br />
Übertemperatur der Wicklung / Temperature increase of motor windings<br />
∆T<br />
=<br />
R – R<br />
w k<br />
--------------------- ⋅ ( 235 + υ )<br />
R k<br />
k<br />
∆T Übertemperatur in Kelvin<br />
υk Umgebungstemperatur (k = kalt) in °C<br />
Rw ; Rk Wicklungswiderstand (w = warm; k = kalt) in Ω<br />
A = P ⋅ s<br />
1<br />
E ------------ GD<br />
7160<br />
2 n 2<br />
= ⋅ ⋅<br />
Drehmoment / Torque:<br />
T = F ⋅ r<br />
M = P ⋅ r<br />
T =<br />
P<br />
9, 55⋅---<br />
n<br />
M =<br />
N<br />
0, 974 ⋅ --n<br />
P<br />
W<br />
= ----<br />
N<br />
t<br />
P = G ⋅ v<br />
N<br />
P = F ⋅ v<br />
N<br />
A<br />
= ---<br />
T<br />
1<br />
= --------------- ⋅G ⋅ v<br />
0, 102<br />
1<br />
= --------------- ⋅P ⋅ v<br />
0, 102<br />
1<br />
N ---------<br />
375<br />
GD 2 ⋅ n<br />
= ⋅ -------------------<br />
Tb<br />
2<br />
m⋅r J ------------- ------<br />
G<br />
r<br />
2 2g<br />
2<br />
GD<br />
= = ⋅<br />
J<br />
2<br />
= -----------<br />
4<br />
v 2<br />
J = 91, 2 ⋅m⋅ -------------<br />
GD<br />
red<br />
n<br />
mot<br />
P = 3 ⋅U⋅ I ⋅ cosϕ<br />
P =<br />
1<br />
2<br />
∆T<br />
2 G<br />
--- d<br />
2<br />
2<br />
= ⋅<br />
3 ⋅ U⋅ I ⋅ cosϕ<br />
η<br />
R – R<br />
w k<br />
=<br />
--------------------- ⋅ ( 235 + υ )<br />
R k<br />
k<br />
⋅<br />
∆T Temperature increase at Kelvin<br />
υk Ambient temperature (k: cold) in °C<br />
Rw ; Rk Resistance of motor winding (w: warm; k: cold) in Ω