Forschungsbericht 2010 - 2011 - Hochschule Bremen
Forschungsbericht 2010 - 2011 - Hochschule Bremen
Forschungsbericht 2010 - 2011 - Hochschule Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Forschungsbericht</strong> <strong>2010</strong> / <strong>2011</strong><br />
200<br />
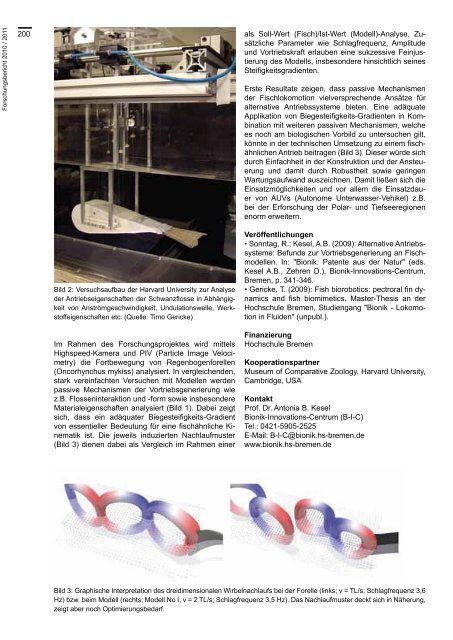
Bild 2: Versuchsaufbau der Harvard University zur Analyse<br />
der Antriebseigenschaften der Schwanzflosse in Abhängigkeit<br />
von Anströmgeschwindigkeit, Undulationswelle, Werkstoffeigenschaften<br />
etc. (Quelle: Timo Gericke)<br />
Im Rahmen des Forschungsprojektes wird mittels<br />
Highspeed-Kamera und PIV (Particle Image Velocimetry)<br />
die Fortbewegung von Regenbogenforellen<br />
(Oncorhynchus mykiss) analysiert. In vergleichenden,<br />
stark vereinfachten Versuchen mit Modellen werden<br />
passive Mechanismen der Vortriebsgenerierung wie<br />
z.B. Flosseninteraktion und -form sowie insbesondere<br />
Materialeigenschaften analysiert (Bild 1). Dabei zeigt<br />
sich, dass ein adäquater Biegesteifigkeits-Gradient<br />
von essentieller Bedeutung für eine fischähnliche Kinematik<br />
ist. Die jeweils induzierten Nachlaufmuster<br />
(Bild 3) dienen dabei als Vergleich im Rahmen einer<br />
als Soll-Wert (Fisch)/Ist-Wert (Modell)-Analyse. Zusätzliche<br />
Parameter wie Schlagfrequenz, Amplitude<br />
und Vortriebskraft erlauben eine sukzessive Feinjustierung<br />
des Modells, insbesondere hinsichtlich seines<br />
Steifigkeitsgradienten.<br />
Erste Resultate zeigen, dass passive Mechanismen<br />
der Fischlokomotion vielversprechende Ansätze für<br />
alternative Antriebssysteme bieten. Eine adäquate<br />
Applikation von Biegesteifigkeits-Gradienten in Kombination<br />
mit weiteren passiven Mechanismen, welche<br />
es noch am biologischen Vorbild zu untersuchen gilt,<br />
könnte in der technischen Umsetzung zu einem fischähnlichen<br />
Antrieb beitragen (Bild 3). Dieser würde sich<br />
durch Einfachheit in der Konstruktion und der Ansteuerung<br />
und damit durch Robustheit sowie geringen<br />
Wartungsaufwand auszeichnen. Damit ließen sich die<br />
Einsatzmöglichkeiten und vor allem die Einsatzdauer<br />
von AUVs (Autonome Unterwasser-Vehikel) z.B.<br />
bei der Erforschung der Polar- und Tiefseeregionen<br />
enorm erweitern.<br />
Veröffentlichungen<br />
• Sonntag, R.; Kesel, A.B. (2009): Alternative Antriebssysteme:<br />
Befunde zur Vortriebsgenerierung an Fischmodellen.<br />
In: "Bionik: Patente aus der Natur" (eds.<br />
Kesel A.B., Zehren D.), Bionik-Innovations-Centrum,<br />
<strong>Bremen</strong>, p. 341-346.<br />
• Gericke, T. (2009): Fish biorobotics: pectroral fin dynamics<br />
and fish biomimetics. Master-Thesis an der<br />
<strong>Hochschule</strong> <strong>Bremen</strong>, Studiengang "Bionik - Lokomotion<br />
in Fluiden" (unpubl.).<br />
Finanzierung<br />
<strong>Hochschule</strong> <strong>Bremen</strong><br />
Kooperationspartner<br />
Museum of Comparative Zoology, Harvard University,<br />
Cambridge, USA<br />
Kontakt<br />
Prof. Dr. Antonia B. Kesel<br />
Bionik-Innovations-Centrum (B-I-C)<br />
Tel.: 0421-5905-2525<br />
E-Mail: B-I-C@bionik.hs-bremen.de<br />
www.bionik.hs-bremen.de<br />
Bild 3: Graphische Interpretation des dreidimensionalen Wirbelnachlaufs bei der Forelle (links; v = TL/s; Schlagfrequenz 3,6<br />
Hz) bzw. beim Modell (rechts; Modell No I, v = 2 TL/s; Schlagfrequenz 3,5 Hz). Das Nachlaufmuster deckt sich in Näherung,<br />
zeigt aber noch Optimierungsbedarf.