

Medizinische Bildverarbeitung - Inforakel
Medizinische Bildverarbeitung - Inforakel
Medizinische Bildverarbeitung - Inforakel

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
36 KAPITEL 5. BILDREGISTRIERUNG UND FUSION<br />
5.1.2 Multimodale Fusion<br />
Es gibt zwei Arten der multimodalen Fusion, also der Fusion zweier Bilder verschiedener Modalität. Die softwaretechnische<br />
Lösung versucht die Aufnahmen aus zwei Geräten mit Methoden der <strong>Bildverarbeitung</strong> zu fusionieren. Hier hat man<br />
auch das Problem der zeitlichen Differenz. Eine teurere aber wesentlich bessere Methode bietet die hardwaretechnische<br />
Lösung, welche die unterschiedlichen Modalitäten in einem Gerät technisch kombiniert. Hier gibt es keine Probleme<br />
durch zeitliche Differenz, die Bilder stimmen optimal überein und der Patient muss nur einmal untersucht werden.<br />
5.2 Registrierungsverfahren<br />
Im Allgemeinen geht man bei der Fusion von Bildern wie folgt vor: die Bilder werden verglichen (Matching, siehe<br />
Abschnitt 5.3) um Punktkorrespondenzen zu finden. Mit diesen Punkten kann dann eine Registrierung durchgeführt<br />
werden. Unter Registrierung versteht man die Berechnung einer Transformation, die zwei korrespondierende Bildinhalte<br />
in zwei verschiedene Koordinatensysteme abbildet [12].<br />
5.2.1 Transformationsbasierte Registrierung<br />
Bei den beschriebenen Transformationen kann es sich um vollkommen beliebige Verschiebungen, Verzerrungen und<br />
Verlagerungen handeln. Vereinfachend geht man von Transformationsmodellen aus, mit einer endlichen Anzahl an Modellparametern<br />
und Freiheitsgraden. Man unterscheidet die Folgenden:<br />
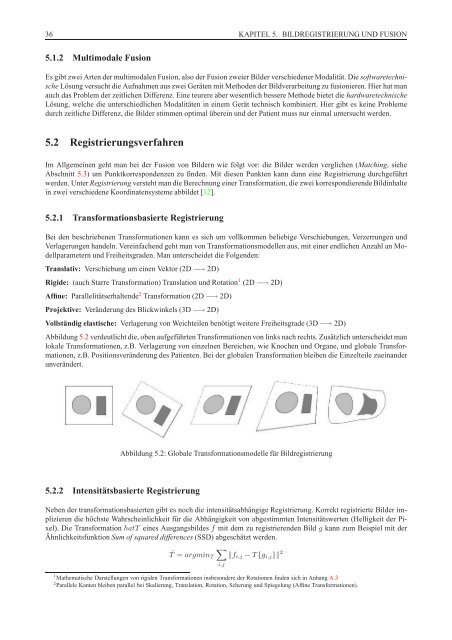
Translativ: Verschiebung um einen Vektor (2D −→ 2D)<br />
Rigide: (auch Starre Transformation) Translation und Rotation 1 (2D −→ 2D)<br />
Affine: Parallelitätserhaltende 2 Transformation (2D −→ 2D)<br />
Projektive: Veränderung des Blickwinkels (3D −→ 2D)<br />
Vollständig elastische: Verlagerung von Weichteilen benötigt weitere Freiheitsgrade (3D −→ 2D)<br />
Abbildung 5.2 verdeutlicht die, oben aufgeführten Transformationen von links nach rechts. Zusätzlich unterscheidet man<br />
lokale Transformationen, z.B. Verlagerung von einzelnen Bereichen, wie Knochen und Organe, und globale Transformationen,<br />
z.B. Positionsveränderung des Patienten. Bei der globalen Transformation bleiben die Einzelteile zueinander<br />
unverändert.<br />
Abbildung 5.2: Globale Transformationsmodelle für Bildregistrierung<br />
5.2.2 Intensitätsbasierte Registrierung<br />
Neben der transformationsbasierten gibt es noch die intensitätsabhängige Registrierung. Korrekt registrierte Bilder implizieren<br />
die höchste Wahrscheinlichkeit für die Abhängigkeit von abgestimmten Intensitätswerten (Helligkeit der Pixel).<br />
Die Transformation hatT eines Ausgangsbildes f mit dem zu registrierenden Bild g kann zum Beispiel mit der<br />
Ähnlichkeitsfunktion Sum of squared differences (SSD) abgeschätzt werden.<br />
�<br />
ˆT = argminT �fi,j − T {gi,j}� 2<br />
1 Mathematische Darstellungen von rigiden Transformationen insbesondere der Rotationen finden sich in Anhang A.3<br />
2 Parallele Kanten bleiben parallel bei Skalierung, Translation, Rotation, Scherung und Spiegelung (Affine Transformationen).<br />
i,j





