

Dissertation - HQ
Dissertation - HQ
Dissertation - HQ

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
A general modelling framework for larval behaviour 121<br />
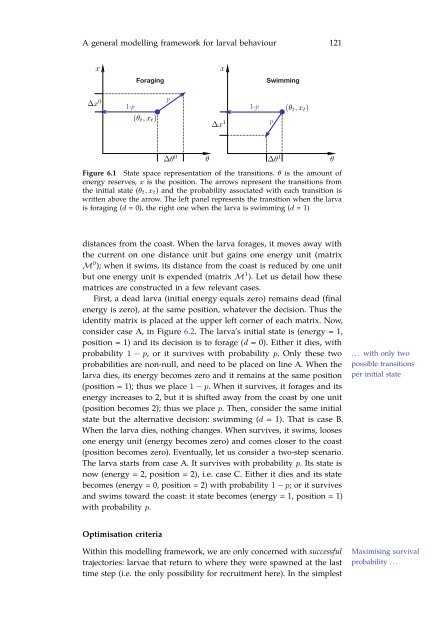
Figure 6.1 State space representation of the transitions. θ is the amount of<br />
energy reserves, x is the position. The arrows represent the transitions from<br />
the initial state (θ t, x t) and the probability associated with each transition is<br />
written above the arrow. The left panel represents the transition when the larva<br />
is foraging (d = 0), the right one when the larva is swimming (d = 1)<br />
distances from the coast. When the larva forages, it moves away with<br />
the current on one distance unit but gains one energy unit (matrix<br />
M 0 ); when it swims, its distance from the coast is reduced by one unit<br />
but one energy unit is expended (matrix M 1 ). Let us detail how these<br />
matrices are constructed in a few relevant cases.<br />
First, a dead larva (initial energy equals zero) remains dead (final<br />
energy is zero), at the same position, whatever the decision. Thus the<br />
identity matrix is placed at the upper left corner of each matrix. Now,<br />
consider case A, in Figure 6.2. The larva’s initial state is (energy = 1,<br />
position = 1) and its decision is to forage (d = 0). Either it dies, with<br />
probability 1 − p, or it survives with probability p. Only these two<br />
probabilities are non-null, and need to be placed on line A. When the<br />
larva dies, its energy becomes zero and it remains at the same position<br />
(position = 1); thus we place 1 − p. When it survives, it forages and its<br />
energy increases to 2, but it is shifted away from the coast by one unit<br />
(position becomes 2); thus we place p. Then, consider the same initial<br />
state but the alternative decision: swimming (d = 1). That is case B.<br />
When the larva dies, nothing changes. When survives, it swims, looses<br />
one energy unit (energy becomes zero) and comes closer to the coast<br />
(position becomes zero). Eventually, let us consider a two-step scenario.<br />
The larva starts from case A. It survives with probability p. Its state is<br />
now (energy = 2, position = 2), i.e. case C. Either it dies and its state<br />
becomes (energy = 0, position = 2) with probability 1 − p; or it survives<br />
and swims toward the coast: it state becomes (energy = 1, position = 1)<br />
with probability p.<br />
. . . with only two<br />
possible transitions<br />
per initial state<br />
Optimisation criteria<br />
Within this modelling framework, we are only concerned with successful<br />
trajectories: larvae that return to where they were spawned at the last<br />
time step (i.e. the only possibility for recruitment here). In the simplest<br />
Maximising survival<br />
probability . . .














