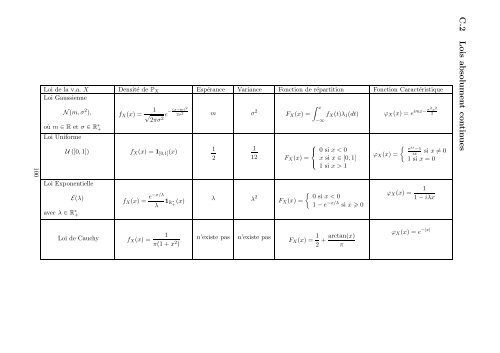
100Loi de la v.a. X Densité de P X Espérance Variance Fonction de répartition Fonction CaractéristiqueLoi GaussienneN(m,σ 2 ),où m ∈ R <strong>et</strong> σ ∈ R ∗ +1f X (x) = √2πσ 2 e−(x−m)2 2σ 2 m σ 2 ∫ xF X (x) = f X (t)λ 1 (dt)−∞ϕ X (x) = e imx− σ2 x 22Loi UniformeU ([0,1]) f X (x) = 1 [0,1] (x) 12Loi ExponentielleE(λ)avec λ ∈ R ∗ +1⎧⎨12 F X (x) =⎩0 si x < 0x si x ∈ [0,1]1 si x > 1{f X (x) = e−x/λλ 1 R ∗ (x) λ λ 2 0 si x < 0F+ X (x) =1 − e −x/λ si x 0ϕ X (x) =ϕ X (x) ={ e ix −1ixsi x ≠ 01 si x = 011 − iλxC.2 Lois absolument continuesLoi de Cauchy f X (x) =1π(1 + x 2 )n’existe pasn’existe pasF X (x) = 1 2 + arctan(x)πϕ X (x) = e −|x|
Bibliographie[1] Barbe, P. <strong>et</strong> Ledoux, M. Probabilités, De la licence à l’agrégation. Belin, 1998.[2] Bouleau, N. Probabilités de l’ingénieur, variables aléatoires <strong>et</strong> simulation. 2nde édition. Hermann, 2002.[3] Briane, M. <strong>et</strong> Pages, G. Théorie de l’intégration. Vuibert, 2006.[4] Foata, D. <strong>et</strong> Fuch, A. Calcul des probabilités. 2nde édition. Dunod, 2003.[5] Herrmann, S. Analyse Fonctionnelle <strong>et</strong> Probabilités. Polycopié de cours, ENSMN, Première année, 2004.[6] Neveu, J. Bases mathématiques du calcul des probabilités. Masson, 1970.[7] Rudin, W. Analyse réelle <strong>et</strong> complexe. 3ème édition. Dunod, 1998.[8] Rudin, W. Principe d’analyse mathématique. Dunod, 2002.[9] Revuz, D. Mesure <strong>et</strong> intégration. Hermann, 1997.[10] Revuz, D. Probabilités. Hermann, 1997.[11] Wagschal, C. Dérivation, intégration. Hermann, 1999.101
- Page 1:
Année 2009-2010Intégration et Pro
- Page 6 and 7:
Remarque 1.1 En probabilités, un e
- Page 8 and 9:
Remarque 1.3 Une tribu étant stabl
- Page 10 and 11:
Exemple 1.4 Soient (Ω, A) un espac
- Page 12 and 13:
Preuve de la proposition 1.15. Éta
- Page 14 and 15:
Donnons à présent la mesure d’u
- Page 16 and 17:
1.3.2 Un exemple : les fonctions é
- Page 18 and 19:
Preuve de la proposition 1.29.• S
- Page 20 and 21:
Remarque 1.21 Soit (Ω, A,µ) un es
- Page 22 and 23:
1. Montrons que µ est bien défini
- Page 24 and 25:
• Supposons I fini. Nous pouvons
- Page 26 and 27:
D’après (i), (ii), (iii) et (iv)
- Page 28 and 29:
Exemple 2.1∫1. Supposons que µ =
- Page 30 and 31:
Nous pouvons donc considérer une s
- Page 32 and 33:
2.1.3 Intégrale d’une fonction d
- Page 34 and 35:
2.2 Propriétés générales de l
- Page 36 and 37:
Nous pouvons énoncer une propriét
- Page 38 and 39:
• Étant donné que pour tout n
- Page 40 and 41:
Alors, A ∈ A et A c ∈ A car les
- Page 42 and 43:
Nous pouvons prolonger F i en une f
- Page 44 and 45:
Proposition 2.27 (Riemann-intégrab
- Page 46 and 47:
2.5.3 L’essentiel de la section 2
- Page 48 and 49:
• Fixons n ∈ N. Notons que par
- Page 51 and 52: Chapitre 3Loi d’une variable alé
- Page 53 and 54: 3.2 Mesure image et loi d’une var
- Page 55 and 56: De plus, (ϕ n ◦ X) n∈N est une
- Page 57 and 58: 2. Par ailleurs, pour tous réels a
- Page 59 and 60: Preuve de la proposition 3.13. Nous
- Page 61 and 62: ••2. Soit F : R → R une fonct
- Page 63 and 64: 3.4 Variables aléatoires et lois a
- Page 65 and 66: La fonction borélienne f étant po
- Page 67 and 68: 3.4.3 Changement de variablesNous n
- Page 69 and 70: Proposition 3.33 (Fonction de répa
- Page 71 and 72: Proposition 3.38Soient X une variab
- Page 73 and 74: Nous commençons par étudier le ca
- Page 75 and 76: Chapitre 4Espaces L p et L pDans ce
- Page 77 and 78: Définition 4.3 (Espace L ∞ (Ω,
- Page 79 and 80: Terminons cette section en remarqua
- Page 81 and 82: Dans le cas où µ est une mesure b
- Page 83 and 84: Par suite,‖f + g‖ p p (‖f‖
- Page 85 and 86: Cette propriété est une conséque
- Page 87 and 88: 4.3 Espaces L p et L p sur un espac
- Page 89 and 90: 4.3.2 InégalitésCommençons par r
- Page 91 and 92: 4.4 Annexes4.4.1 Annexe : Preuve du
- Page 93 and 94: Étudions à présent les moments d
- Page 95 and 96: Annexe AClasses monotonesDe nombreu
- Page 97 and 98: Ce théorème permet de montrer que
- Page 99 and 100: Annexe BIntégrales dépendant d’
- Page 101: Loi de la v.a. X P X Espérance Var