

Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
D.2 Berechnung des Ausrichtungswinkels des Ego-Fahrzeugs am Gate<br />
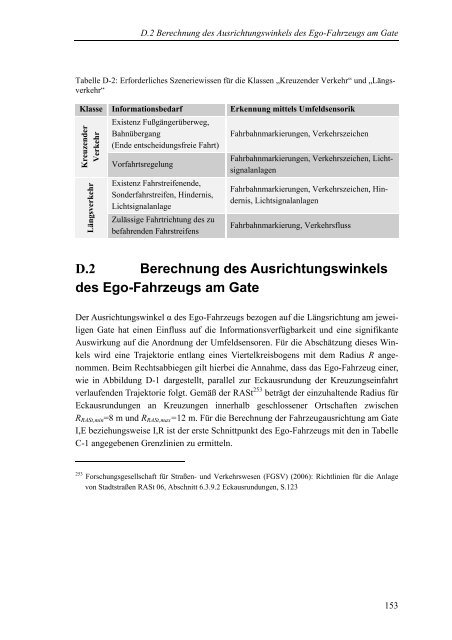
Tabelle D-2: Erforderliches Szeneriewissen für die Klassen „Kreuzender Verkehr“ und „Längsverkehr“<br />
Klasse Informationsbedarf Erkennung mittels Umfeldsensorik<br />
Kreuzender<br />
Verkehr<br />
Längsverkehr<br />
Existenz Fußgängerüberweg,<br />
Bahnübergang<br />
(Ende entscheidungsfreie Fahrt)<br />
Vorfahrtsregelung<br />
Existenz Fahrstreifenende,<br />
Sonderfahrstreifen, Hindernis,<br />
Lichtsignalanlage<br />
Zulässige Fahrtrichtung des zu<br />
befahrenden Fahrstreifens<br />
Fahrbahnmarkierungen, Verkehrszeichen<br />
Fahrbahnmarkierungen, Verkehrszeichen, Lichtsignalanlagen<br />
Fahrbahnmarkierungen, Verkehrszeichen, Hindernis,<br />
Lichtsignalanlagen<br />
Fahrbahnmarkierung, Verkehrsfluss<br />
D.2 Berechnung des Ausrichtungswinkels<br />
des Ego-Fahrzeugs am Gate<br />
Der Ausrichtungswinkel α des Ego-Fahrzeugs bezogen auf die Längsrichtung am jeweiligen<br />
Gate hat einen Einfluss auf die Informationsverfügbarkeit und eine signifikante<br />
Auswirkung auf die Anordnung der Umfeldsensoren. Für die Abschätzung dieses Winkels<br />
wird eine Trajektorie entlang eines Viertelkreisbogens mit dem Radius R angenommen.<br />
Beim Rechtsabbiegen gilt hierbei die Annahme, dass das Ego-Fahrzeug einer,<br />
wie in Abbildung D-1 dargestellt, parallel zur Eckausrundung der Kreuzungseinfahrt<br />
verlaufenden Trajektorie folgt. Gemäß der RASt 253 beträgt der einzuhaltende Radius für<br />
Eckausrundungen an Kreuzungen innerhalb geschlossener Ortschaften zwischen<br />
R RASt,min =8 m und R RASt,max =12 m. Für die Berechnung der Fahrzeugausrichtung am Gate<br />
I,E beziehungsweise I,R ist der erste Schnittpunkt des Ego-Fahrzeugs mit den in Tabelle<br />
C-1 angegebenen Grenzlinien zu ermitteln.<br />
253 Forschungsgesellschaft für Straßen- und Verkehrswesen (FGSV) (2006): Richtlinien für die Anlage<br />
von Stadtstraßen RASt 06, Abschnitt 6.3.9.2 Eckausrundungen, S.123<br />
153













