

Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3.1 Das Gate-Konzept<br />
„Anzeige“ „Vorschlag“ „Entscheidung“<br />
Fahrer<br />
Automation<br />
Fahrer<br />
Automation<br />
Fahrer<br />
Automation<br />
Manöverbefehl<br />
Manöverbefehl<br />
Manöverbefehl<br />
Anzeige: Gate-Position<br />
Anzeige: Gate-Position<br />
Anzeige: Gate-Position<br />
Anzeige: Aufforderung Entscheidung<br />
Entscheidung<br />
Anzeige: Ausführung Entscheidung<br />
Anzeige: Vorschlag<br />
Explizite Bestätigung<br />
Explizite Ablehnung<br />
Anzeige: Vorschlag<br />
Anzeige: Entscheidung<br />
Anzeige: Ausführung Entscheidung<br />
Zeit<br />
Anzeige: Ausführung Entscheidung<br />
Explizite Bestätigung<br />
Explizite Ablehnung<br />
Anzeige: Ausführung Entscheidung<br />
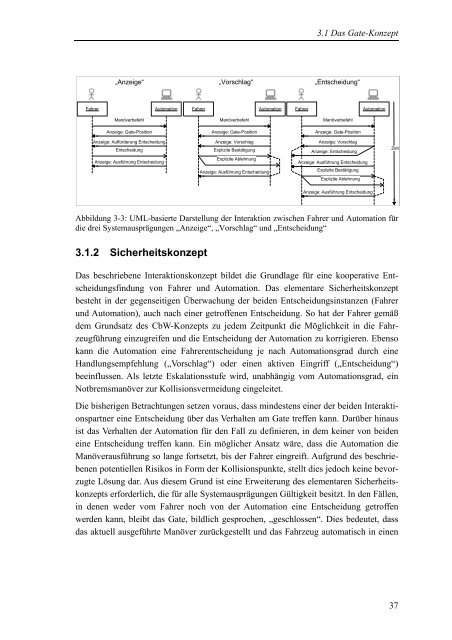
Abbildung 3-3: UML-basierte Darstellung der Interaktion zwischen Fahrer und Automation für<br />
die drei Systemausprägungen „Anzeige“, „Vorschlag“ und „Entscheidung“<br />
3.1.2 Sicherheitskonzept<br />
Das beschriebene Interaktionskonzept bildet die Grundlage für eine kooperative Entscheidungsfindung<br />
von Fahrer und Automation. Das elementare Sicherheitskonzept<br />
besteht in der gegenseitigen Überwachung der beiden Entscheidungsinstanzen (Fahrer<br />
und Automation), auch nach einer getroffenen Entscheidung. So hat der Fahrer gemäß<br />
dem Grundsatz des CbW-Konzepts zu jedem Zeitpunkt die Möglichkeit in die Fahrzeugführung<br />
einzugreifen und die Entscheidung der Automation zu korrigieren. Ebenso<br />
kann die Automation eine Fahrerentscheidung je nach Automationsgrad durch eine<br />
Handlungsempfehlung („Vorschlag“) oder einen aktiven Eingriff („Entscheidung“)<br />
beeinflussen. Als letzte Eskalationsstufe wird, unabhängig vom Automationsgrad, ein<br />
Notbremsmanöver zur Kollisionsvermeidung eingeleitet.<br />
Die bisherigen Betrachtungen setzen voraus, dass mindestens einer der beiden Interaktionspartner<br />
eine Entscheidung über das Verhalten am Gate treffen kann. Darüber hinaus<br />
ist das Verhalten der Automation für den Fall zu definieren, in dem keiner von beiden<br />
eine Entscheidung treffen kann. Ein möglicher Ansatz wäre, dass die Automation die<br />
Manöverausführung so lange fortsetzt, bis der Fahrer eingreift. Aufgrund des beschriebenen<br />
potentiellen Risikos in Form der Kollisionspunkte, stellt dies jedoch keine bevorzugte<br />
Lösung dar. Aus diesem Grund ist eine Erweiterung des elementaren Sicherheitskonzepts<br />
erforderlich, die für alle Systemausprägungen Gültigkeit besitzt. In den Fällen,<br />
in denen weder vom Fahrer noch von der Automation eine Entscheidung getroffen<br />
werden kann, bleibt das Gate, bildlich gesprochen, „geschlossen“. Dies bedeutet, dass<br />
das aktuell ausgeführte Manöver zurückgestellt und das Fahrzeug automatisch in einen<br />
37













