

Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5.1 Analyse des Entscheidungsprozesses<br />
Entscheidungsfreie Fahrt<br />
CbW-Automationsgrad 1, 2, 3<br />
Änderung der Szenerie<br />
Szeneriewissen<br />
Manöver<br />
Gate-Lokalisierung<br />
Identifikation der Szenerie<br />
Gate-Identifikation<br />
Gate-Positionierung<br />
Kontextwissen<br />
CbW-Automationsgrad 2, 3<br />
Entscheidungsfindung Gate-Passage<br />
Gate 1 Gate 2 Gate n<br />
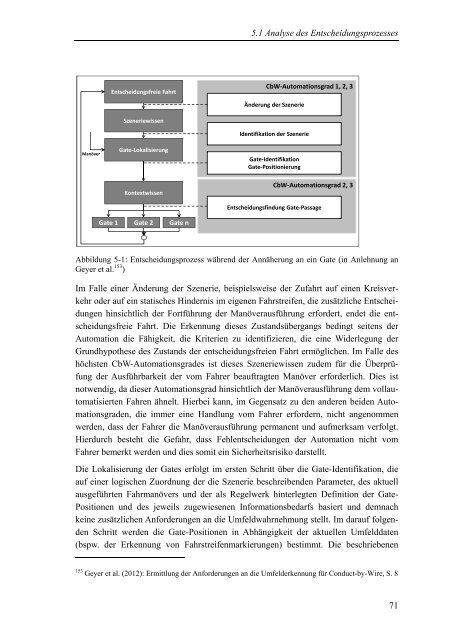
Abbildung 5-1: Entscheidungsprozess während der Annäherung an ein Gate (in Anlehnung an<br />
Geyer et al. 153 )<br />
Im Falle einer Änderung der Szenerie, beispielsweise der Zufahrt auf einen Kreisverkehr<br />
oder auf ein statisches Hindernis im eigenen Fahrstreifen, die zusätzliche Entscheidungen<br />
hinsichtlich der Fortführung der Manöverausführung erfordert, endet die entscheidungsfreie<br />
Fahrt. Die Erkennung dieses Zustandsübergangs bedingt seitens der<br />
Automation die Fähigkeit, die Kriterien zu identifizieren, die eine Widerlegung der<br />
Grundhypothese des Zustands der entscheidungsfreien Fahrt ermöglichen. Im Falle des<br />
höchsten CbW-Automationsgrades ist dieses Szeneriewissen zudem für die Überprüfung<br />
der Ausführbarkeit der vom Fahrer beauftragten Manöver erforderlich. Dies ist<br />
notwendig, da dieser Automationsgrad hinsichtlich der Manöverausführung dem vollautomatisierten<br />
Fahren ähnelt. Hierbei kann, im Gegensatz zu den anderen beiden Automationsgraden,<br />
die immer eine Handlung vom Fahrer erfordern, nicht angenommen<br />
werden, dass der Fahrer die Manöverausführung permanent und aufmerksam verfolgt.<br />
Hierdurch besteht die Gefahr, dass Fehlentscheidungen der Automation nicht vom<br />
Fahrer bemerkt werden und dies somit ein Sicherheitsrisiko darstellt.<br />
Die Lokalisierung der Gates erfolgt im ersten Schritt über die Gate-Identifikation, die<br />
auf einer logischen Zuordnung der die Szenerie beschreibenden Parameter, des aktuell<br />
ausgeführten Fahrmanövers und der als Regelwerk hinterlegten Definition der Gate-<br />
Positionen und des jeweils zugewiesenen Informationsbedarfs basiert und demnach<br />
keine zusätzlichen Anforderungen an die Umfeldwahrnehmung stellt. Im darauf folgenden<br />
Schritt werden die Gate-Positionen in Abhängigkeit der aktuellen Umfelddaten<br />
(bspw. der Erkennung von Fahrstreifenmarkierungen) bestimmt. Die beschriebenen<br />
153 Geyer et al. (2012): Ermittlung der Anforderungen an die Umfelderkennung für Conduct-by-Wire, S. 8<br />
71













