

Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5.2 Anforderungsanalyse<br />
Detektion, das nächste Gate zu passieren, ist im Falle von CbW nicht zulässig. Die auf<br />
diese Weise dem Fahrer suggerierte Gefahrlosigkeit kann im Gegensatz zu CMS das<br />
Risiko bei einer nicht situationsgerechten Entscheidung erhöhen. Aus diesem Grund<br />
muss von der Automation im Falle einer ausbleibenden Detektion zusätzlich sichergestellt<br />
werden, dass der für die Entscheidungsfindung erforderliche Informationsbereich<br />
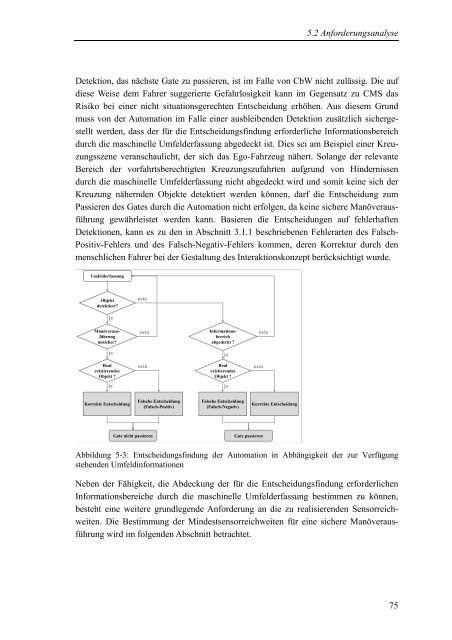
durch die maschinelle Umfelderfassung abgedeckt ist. Dies sei am Beispiel einer Kreuzungsszene<br />
veranschaulicht, der sich das Ego-Fahrzeug nähert. Solange der relevante<br />
Bereich der vorfahrtsberechtigten Kreuzungszufahrten aufgrund von Hindernissen<br />
durch die maschinelle Umfelderfassung nicht abgedeckt wird und somit keine sich der<br />
Kreuzung nähernden Objekte detektiert werden können, darf die Entscheidung zum<br />
Passieren des Gates durch die Automation nicht erfolgen, da keine sichere Manöverausführung<br />
gewährleistet werden kann. Basieren die Entscheidungen auf fehlerhaften<br />
Detektionen, kann es zu den in Abschnitt 3.1.1 beschriebenen Fehlerarten des Falsch-<br />
Positiv-Fehlers und des Falsch-Negativ-Fehlers kommen, deren Korrektur durch den<br />
menschlichen Fahrer bei der Gestaltung des Interaktionskonzept berücksichtigt wurde.<br />
Umfelderfassung<br />
Objekt<br />
detektiert?<br />
nein<br />
ja<br />
Manöverausführung<br />
unsicher?<br />
nein<br />
Informationsbereich<br />
abgedeckt ?<br />
nein<br />
ja<br />
ja<br />
Real<br />
existierendes<br />
Objekt ?<br />
nein<br />
Real<br />
existierendes<br />
Objekt ?<br />
nein<br />
ja<br />
ja<br />
Korrekte Entscheidung<br />
Falsche Entscheidung<br />
(Falsch-Positiv)<br />
Falsche Entscheidung<br />
(Falsch-Negativ)<br />
Korrekte Entscheidung<br />
Gate nicht passieren<br />
Gate passieren<br />
Abbildung 5-3: Entscheidungsfindung der Automation in Abhängigkeit der zur Verfügung<br />
stehenden Umfeldinformationen<br />
Neben der Fähigkeit, die Abdeckung der für die Entscheidungsfindung erforderlichen<br />
Informationsbereiche durch die maschinelle Umfelderfassung bestimmen zu können,<br />
besteht eine weitere grundlegende Anforderung an die zu realisierenden Sensorreichweiten.<br />
Die Bestimmung der Mindestsensorreichweiten für eine sichere Manöverausführung<br />
wird im folgenden Abschnitt betrachtet.<br />
75













