

Objektorientierte Modellierung zur Simulation des Steuerverhaltens ...
Objektorientierte Modellierung zur Simulation des Steuerverhaltens ...
Objektorientierte Modellierung zur Simulation des Steuerverhaltens ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Beschreibung von Bausteinen für Transfersysteme 39<br />
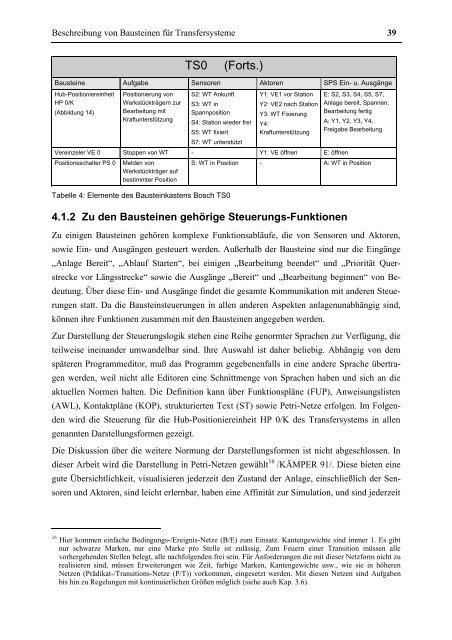
TS0 (Forts.)<br />
Bausteine Aufgabe Sensoren Aktoren SPS Ein- u. Ausgänge<br />
Hub-Positioniereinheit Positionierung von S2: WT Ankunft Y1: VE1 vor Station E: S2, S3, S4, S5, S7,<br />
HP 0/K<br />
Werkstückträgern <strong>zur</strong> S3: WT in<br />
Y2: VE2 nach Station Anlage bereit, Spannen,<br />
(Abbildung 14) Bearbeitung mit<br />
Kraftunterstützung<br />
Spannposition<br />
S4: Station wieder frei<br />
S5: WT fixiert<br />
S7: WT unterstützt<br />
Y3: WT Fixierung<br />
Y4:<br />
Kraftunterstützung<br />
Bearbeitung fertig<br />
A: Y1, Y2, Y3, Y4,<br />
Freigabe Bearbeitung<br />
Vereinzeler VE 0 Stoppen von WT - Y1: VE öffnen E: öffnen<br />
Positionsschalter PS 0 Melden von<br />
Werkstückträger auf<br />
bestimmter Position<br />
S: WT in Position - A: WT in Position<br />
Tabelle 4: Elemente <strong>des</strong> Bausteinkastens Bosch TS0<br />
4.1.2 Zu den Bausteinen gehörige Steuerungs-Funktionen<br />
Zu einigen Bausteinen gehören komplexe Funktionsabläufe, die von Sensoren und Aktoren,<br />
sowie Ein- und Ausgängen gesteuert werden. Außerhalb der Bausteine sind nur die Eingänge<br />
„Anlage Bereit“, „Ablauf Starten“, bei einigen „Bearbeitung beendet“ und „Priorität Querstrecke<br />
vor Längsstrecke“ sowie die Ausgänge „Bereit“ und „Bearbeitung beginnen“ von Bedeutung.<br />
Über diese Ein- und Ausgänge findet die gesamte Kommunikation mit anderen Steuerungen<br />
statt. Da die Bausteinsteuerungen in allen anderen Aspekten anlagenunabhängig sind,<br />
können ihre Funktionen zusammen mit den Bausteinen angegeben werden.<br />
Zur Darstellung der Steuerungslogik stehen eine Reihe genormter Sprachen <strong>zur</strong> Verfügung, die<br />
teilweise ineinander umwandelbar sind. Ihre Auswahl ist daher beliebig. Abhängig von dem<br />
späteren Programmeditor, muß das Programm gegebenenfalls in eine andere Sprache übertragen<br />
werden, weil nicht alle Editoren eine Schnittmenge von Sprachen haben und sich an die<br />
aktuellen Normen halten. Die Definition kann über Funktionspläne (FUP), Anweisungslisten<br />
(AWL), Kontaktpläne (KOP), strukturierten Text (ST) sowie Petri-Netze erfolgen. Im Folgenden<br />
wird die Steuerung für die Hub-Positioniereinheit HP 0/K <strong>des</strong> Transfersystems in allen<br />
genannten Darstellungsformen gezeigt.<br />
Die Diskussion über die weitere Normung der Darstellungsformen ist nicht abgeschlossen. In<br />
dieser Arbeit wird die Darstellung in Petri-Netzen gewählt 16 /KÄMPER 91/. Diese bieten eine<br />
gute Übersichtlichkeit, visualisieren jederzeit den Zustand der Anlage, einschließlich der Sensoren<br />
und Aktoren, sind leicht erlernbar, haben eine Affinität <strong>zur</strong> <strong>Simulation</strong>, und sind jederzeit<br />
16 Hier kommen einfache Bedingungs-/Ereignis-Netze (B/E) zum Einsatz. Kantengewichte sind immer 1. Es gibt<br />
nur schwarze Marken, nur eine Marke pro Stelle ist zulässig. Zum Feuern einer Transition müssen alle<br />
vorhergehenden Stellen belegt, alle nachfolgenden frei sein. Für Anforderungen die mit dieser Netzform nicht zu<br />
realisieren sind, müssen Erweiterungen wie Zeit, farbige Marken, Kantengewichte usw., wie sie in höheren<br />
Netzen (Prädikat-/Transitions-Netze (P/T)) vorkommen, eingesetzt werden. Mit diesen Netzen sind Aufgaben<br />
bis hin zu Regelungen mit kontinuierlichen Größen möglich (siehe auch Kap. 3.6).













