Reporte de actividades del proyecto de Investigación en ...
Reporte de actividades del proyecto de Investigación en ...
Reporte de actividades del proyecto de Investigación en ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.5 Descripción <strong>de</strong>l <strong>proyecto</strong><br />
El sistema <strong>de</strong> visón <strong>de</strong> reconocimi<strong>en</strong>to <strong>de</strong> objetos que se pres<strong>en</strong>ta <strong>en</strong> esta tesis<br />
inicialm<strong>en</strong>te se planteó para personas invi<strong>de</strong>ntes; pero <strong>de</strong>bido a la problemática<br />
exist<strong>en</strong>te <strong>en</strong> el diseño <strong>de</strong> algoritmos g<strong>en</strong>erales eficaces, y diversos factores que<br />
intervi<strong>en</strong><strong>en</strong> <strong>en</strong> su <strong>de</strong>sarrollo (que son <strong>de</strong> gran importancia para la obt<strong>en</strong>ción <strong>de</strong><br />
bu<strong>en</strong>os resultados) como son: iluminación, condiciones atmosféricas, tamaño <strong>de</strong> los<br />
objetos, distancia <strong>de</strong> los objetos, fondos contrastantes con los objetos a reconocer,<br />
objetos traslapados, <strong>en</strong>tre otros. Debido a lo anterior, nuestro sistema se<br />
implem<strong>en</strong>ta <strong>de</strong>ntro <strong>de</strong> un salón <strong>de</strong> clases y se limita a reconocer 10 objetos<br />
pequeños.<br />
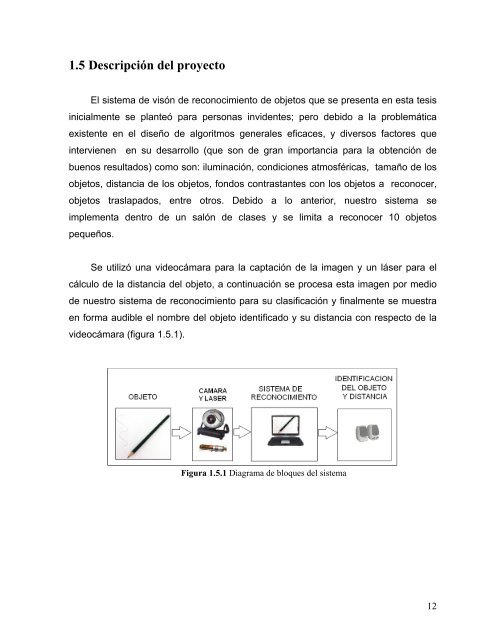
Se utilizó una vi<strong>de</strong>ocámara para la captación <strong>de</strong> la imag<strong>en</strong> y un láser para el<br />
cálculo <strong>de</strong> la distancia <strong>de</strong>l objeto, a continuación se procesa esta imag<strong>en</strong> por medio<br />
<strong>de</strong> nuestro sistema <strong>de</strong> reconocimi<strong>en</strong>to para su clasificación y finalm<strong>en</strong>te se muestra<br />
<strong>en</strong> forma audible el nombre <strong>de</strong>l objeto i<strong>de</strong>ntificado y su distancia con respecto <strong>de</strong> la<br />
vi<strong>de</strong>ocámara (figura 1.5.1).<br />
Figura 1.5.1 Diagrama <strong>de</strong> bloques <strong>de</strong>l sistema<br />
12