

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.2<br />
1<br />
0.8<br />
0.6<br />
u<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
y<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−2 0 2 4<br />
tid<br />
6 8 10<br />
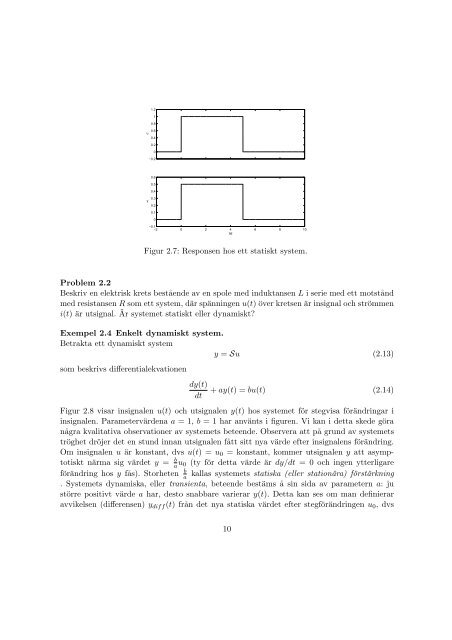
Figur 2.7: Responsen hos ett statiskt system.<br />
Problem 2.2<br />
Beskriv en elektrisk krets best˚aende av en spole med induktansen L i serie med ett motst˚and<br />
med resistansen R som ett system, där spänningen u(t) över kretsen är insignal <strong>och</strong> strömmen<br />
i(t) är utsignal. Är systemet statiskt eller dynamiskt?<br />
Exempel 2.4 Enkelt dynamiskt system.<br />
Betrakta ett dynamiskt system<br />
y = Su (2.13)<br />
som beskrivs differentialekvationen<br />
dy(t)<br />
dt<br />
+ ay(t) = bu(t) (2.14)<br />
Figur 2.8 visar insignalen u(t) <strong>och</strong> utsignalen y(t) hos systemet för stegvisa förändringar i<br />
insignalen. Parametervärdena a = 1, b = 1 har använts i figuren. Vi kan i detta skede göra<br />
n˚agra kvalitativa observationer av systemets beteende. Observera att p˚a grund av systemets<br />
tröghet dröjer det en stund innan utsignalen f˚att sitt nya värde efter insignalens förändring.<br />
Om insignalen u är konstant, dvs u(t) = u0 = konstant, kommer utsignalen y att asymp-<br />
totiskt närma sig värdet y = b<br />
a u0 (ty för detta värde är dy/dt = 0 <strong>och</strong> ingen ytterligare<br />
förändring hos y f˚as). Storheten b<br />
a<br />
kallas systemets statiska (eller stationära) förstärkning<br />
. Systemets dynamiska, eller transienta, beteende bestäms ˚a sin sida av parametern a: ju<br />
större positivt värde a har, desto snabbare varierar y(t). Detta kan ses om man definierar<br />
avvikelsen (differensen) ydiff (t) fr˚an det nya statiska värdet efter stegförändringen u0, dvs<br />
10














