

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1.2<br />
1<br />
0.8<br />
0.6<br />
u<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
y<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
−2 0 2 4<br />
tid<br />
6 8 10<br />
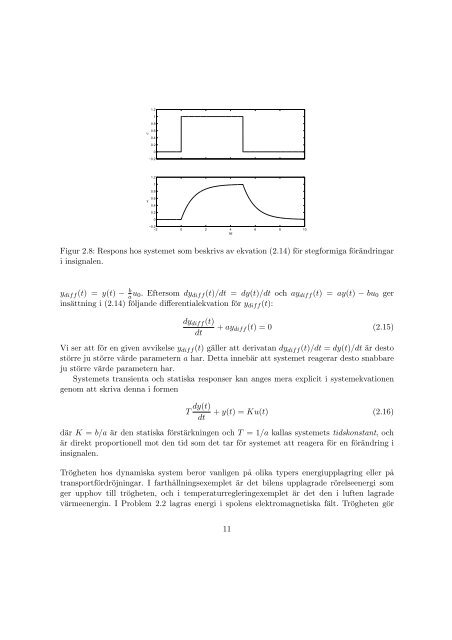
Figur 2.8: Respons hos systemet som beskrivs av ekvation (2.14) för stegformiga förändringar<br />
i insignalen.<br />
ydiff (t) = y(t) − b<br />
a u0. Eftersom dydiff (t)/dt = dy(t)/dt <strong>och</strong> aydiff (t) = ay(t) − bu0 ger<br />
insättning i (2.14) följande differentialekvation för ydiff (t):<br />
dydiff (t)<br />
dt<br />
+ aydiff (t) = 0 (2.15)<br />
Vi ser att för en given avvikelse ydiff (t) gäller att derivatan dydiff (t)/dt = dy(t)/dt är desto<br />
större ju större värde parametern a har. Detta innebär att systemet reagerar desto snabbare<br />
ju större värde parametern har.<br />
Systemets transienta <strong>och</strong> statiska responser kan anges mera explicit i systemekvationen<br />
genom att skriva denna i formen<br />
T dy(t)<br />
dt<br />
+ y(t) = Ku(t) (2.16)<br />
där K = b/a är den statiska förstärkningen <strong>och</strong> T = 1/a kallas systemets tidskonstant, <strong>och</strong><br />
är direkt proportionell mot den tid som det tar för systemet att reagera för en förändring i<br />
insignalen.<br />
Trögheten hos dynamiska system beror vanligen p˚a olika typers energiupplagring eller p˚a<br />
transportfördröjningar. I farth˚allningsexemplet är det bilens upplagrade rörelseenergi som<br />
ger upphov till trögheten, <strong>och</strong> i temperaturregleringexemplet är det den i luften lagrade<br />
värmeenergin. I Problem 2.2 lagras energi i spolens elektromagnetiska fält. Trögheten gör<br />
11














