

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.2<br />
1<br />
0.8<br />
0.6<br />
u<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
1.5<br />
1<br />
y 0.5<br />
Löser vi ut y ur ekvation (3.7) f˚as<br />
eller<br />
där vi definierat<br />
0<br />
−0.5<br />
−2 −1 0 1 2 3<br />
tid<br />
4 5 6 7 8<br />
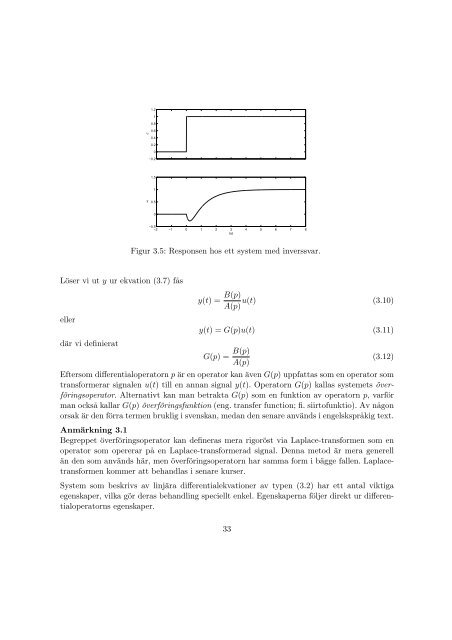
Figur 3.5: Responsen hos ett system med inverssvar.<br />
y(t) = B(p)<br />
u(t) (3.10)<br />
A(p)<br />
y(t) = G(p)u(t) (3.11)<br />
G(p) = B(p)<br />
A(p)<br />
(3.12)<br />
Eftersom differentialoperatorn p är en operator kan även G(p) uppfattas som en operator som<br />
transformerar signalen u(t) till en annan signal y(t). Operatorn G(p) kallas systemets överföringsoperator.<br />
Alternativt kan man betrakta G(p) som en funktion av operatorn p, varför<br />
man ocks˚a kallar G(p) överföringsfunktion (eng. transfer function; fi. siirtofunktio). Av n˚agon<br />
orsak är den förra termen bruklig i svenskan, medan den senare används i engelskspr˚akig text.<br />
Anmärkning 3.1<br />
Begreppet överföringsoperator kan defineras mera rigoröst via Laplace-transformen som en<br />
operator som opererar p˚a en Laplace-transformerad signal. Denna metod är mera generell<br />
än den som används här, men överföringsoperatorn har samma form i bägge fallen. Laplacetransformen<br />
kommer att behandlas i senare kurser.<br />
System som beskrivs av linjära differentialekvationer av typen (3.2) har ett antal viktiga<br />
egenskaper, vilka gör deras behandling speciellt enkel. Egenskaperna följer direkt ur differentialoperatorns<br />
egenskaper.<br />
33














