

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
❄<br />
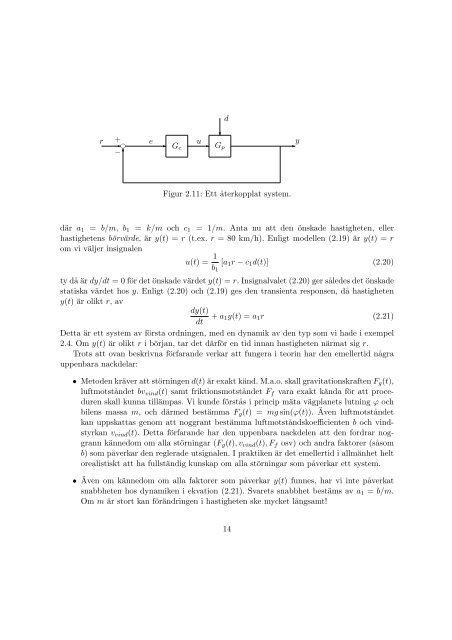
+<br />
✲ ❡ e ✲ u<br />
y<br />
Gc<br />
✲ Gp<br />
✲<br />
− ✻<br />
d<br />
Figur 2.11: Ett ˚aterkopplat system.<br />
där a1 = b/m, b1 = k/m <strong>och</strong> c1 = 1/m. Anta nu att den önskade hastigheten, eller<br />
hastighetens börvärde, är y(t) = r (t.ex. r = 80 km/h). Enligt modellen (2.19) är y(t) = r<br />
om vi väljer insignalen<br />
u(t) = 1<br />
[a1r − c1d(t)] (2.20)<br />
b1<br />
ty d˚a är dy/dt = 0 för det önskade värdet y(t) = r. Insignalvalet (2.20) ger s˚aledes det önskade<br />
statiska värdet hos y. Enligt (2.20) <strong>och</strong> (2.19) ges den transienta responsen, d˚a hastigheten<br />
y(t) är olikt r, av<br />
dy(t)<br />
dt + a1y(t) = a1r (2.21)<br />
Detta är ett system av första ordningen, med en dynamik av den typ som vi hade i exempel<br />
2.4. Om y(t) är olikt r i början, tar det därför en tid innan hastigheten närmat sig r.<br />
Trots att ovan beskrivna förfarande verkar att fungera i teorin har den emellertid n˚agra<br />
uppenbara nackdelar:<br />
• Metoden kräver att störningen d(t) är exakt känd. M.a.o. skall gravitationskraften Fg(t),<br />
luftmotst˚andet bvvind(t) samt friktionsmotst˚andet Ff vara exakt kända för att proceduren<br />
skall kunna tillämpas. Vi kunde först˚as i princip mäta vägplanets lutning ϕ <strong>och</strong><br />
bilens massa m, <strong>och</strong> därmed bestämma Fg(t) = mg sin(ϕ(t)). Även luftmotst˚andet<br />
kan uppskattas genom att noggrant bestämma luftmotst˚andskoefficienten b <strong>och</strong> vindstyrkan<br />
vvind(t). Detta förfarande har den uppenbara nackdelen att den fordrar noggrann<br />
kännedom om alla störningar (Fg(t), vvind(t), Ff osv) <strong>och</strong> andra faktorer (s˚asom<br />
b) som p˚averkar den reglerade utsignalen. I praktiken är det emellertid i allmänhet helt<br />
orealistiskt att ha fullständig kunskap om alla störningar som p˚averkar ett system.<br />
• Även om kännedom om alla faktorer som p˚averkar y(t) funnes, har vi inte p˚averkat<br />
snabbheten hos dynamiken i ekvation (2.21). Svarets snabbhet bestäms av a1 = b/m.<br />
Om m är stort kan förändringen i hastigheten ske mycket l˚angsamt!<br />
14














