

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1.2<br />
1<br />
0.8<br />
0.6<br />
u<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
100<br />
80<br />
60<br />
y<br />
40<br />
20<br />
0<br />
−2 −1 0 1 2 3 4 5<br />
tid<br />
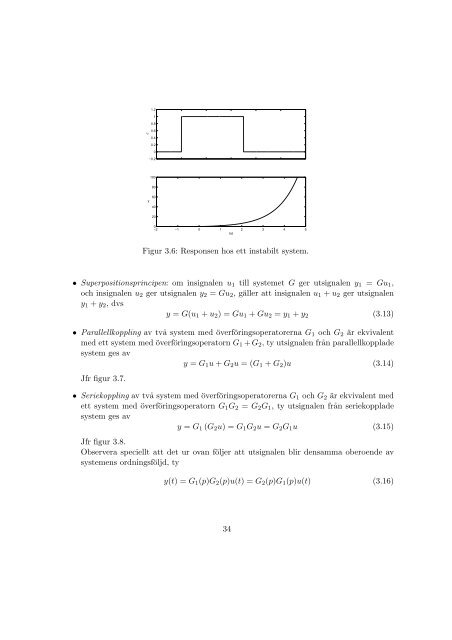
Figur 3.6: Responsen hos ett instabilt system.<br />
• Superpositionsprincipen: om insignalen u1 till systemet G ger utsignalen y1 = Gu1,<br />
<strong>och</strong> insignalen u2 ger utsignalen y2 = Gu2, gäller att insignalen u1 + u2 ger utsignalen<br />
y1 + y2, dvs<br />
y = G(u1 + u2) = Gu1 + Gu2 = y1 + y2<br />
(3.13)<br />
• Parallellkoppling av tv˚a system med överföringsoperatorerna G1 <strong>och</strong> G2 är ekvivalent<br />
med ett system med överföringsoperatorn G1 + G2, ty utsignalen fr˚an parallellkopplade<br />
system ges av<br />
y = G1u + G2u = (G1 + G2)u (3.14)<br />
Jfr figur 3.7.<br />
• Seriekoppling av tv˚a system med överföringsoperatorerna G1 <strong>och</strong> G2 är ekvivalent med<br />
ett system med överföringsoperatorn G1G2 = G2G1, ty utsignalen fr˚an seriekopplade<br />
system ges av<br />
y = G1 (G2u) = G1G2u = G2G1u (3.15)<br />
Jfr figur 3.8.<br />
Observera speciellt att det ur ovan följer att utsignalen blir densamma oberoende av<br />
systemens ordningsföljd, ty<br />
y(t) = G1(p)G2(p)u(t) = G2(p)G1(p)u(t) (3.16)<br />
34














