

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
där<br />
r<br />
+<br />
✲ ❡ e ✲ u<br />
Gc<br />
✲ Gp<br />
✲<br />
− ✻<br />
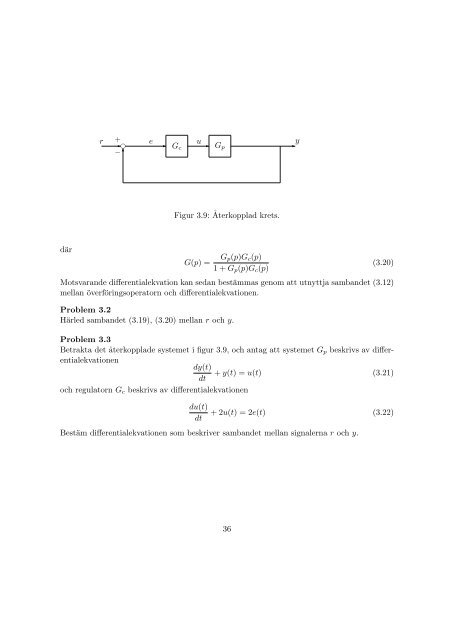
Figur 3.9: ˚ Aterkopplad krets.<br />
G(p) = Gp(p)Gc(p)<br />
1 + Gp(p)Gc(p)<br />
y<br />
(3.20)<br />
Motsvarande differentialekvation kan sedan bestämmas genom att utnyttja sambandet (3.12)<br />
mellan överföringsoperatorn <strong>och</strong> differentialekvationen.<br />
Problem 3.2<br />
Härled sambandet (3.19), (3.20) mellan r <strong>och</strong> y.<br />
Problem 3.3<br />
Betrakta det ˚aterkopplade systemet i figur 3.9, <strong>och</strong> antag att systemet Gp beskrivs av differentialekvationen<br />
dy(t)<br />
+ y(t) = u(t) (3.21)<br />
dt<br />
<strong>och</strong> regulatorn Gc beskrivs av differentialekvationen<br />
du(t)<br />
dt<br />
+ 2u(t) = 2e(t) (3.22)<br />
Bestäm differentialekvationen som beskriver sambandet mellan signalerna r <strong>och</strong> y.<br />
36














