

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
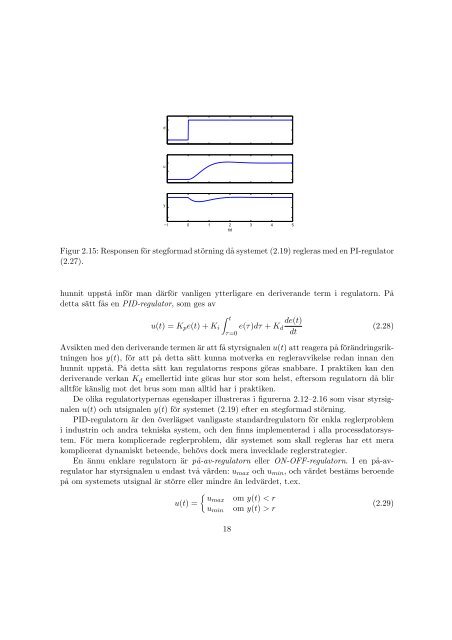
d<br />
u<br />
y<br />
−1 0 1 2<br />
tid<br />
3 4 5<br />
Figur 2.15: Responsen för stegformad störning d˚a systemet (2.19) regleras med en PI-regulator<br />
(2.27).<br />
hunnit uppst˚a inför man därför vanligen ytterligare en deriverande term i regulatorn. P˚a<br />
detta sätt f˚as en PID-regulator, som ges av<br />
u(t) = Kpe(t) + Ki<br />
t<br />
τ=0<br />
de(t)<br />
e(τ)dτ + Kd<br />
dt<br />
(2.28)<br />
Avsikten med den deriverande termen är att f˚a styrsignalen u(t) att reagera p˚a förändringsriktningen<br />
hos y(t), för att p˚a detta sätt kunna motverka en regleravvikelse redan innan den<br />
hunnit uppst˚a. P˚a detta sätt kan regulatorns respons göras snabbare. I praktiken kan den<br />
deriverande verkan Kd emellertid inte göras hur stor som helst, eftersom regulatorn d˚a blir<br />
alltför känslig mot det brus som man alltid har i praktiken.<br />
De olika regulatortypernas egenskaper illustreras i figurerna 2.12–2.16 som visar styrsignalen<br />
u(t) <strong>och</strong> utsignalen y(t) för systemet (2.19) efter en stegformad störning.<br />
PID-regulatorn är den överlägset vanligaste standardregulatorn för enkla reglerproblem<br />
i industrin <strong>och</strong> andra tekniska system, <strong>och</strong> den finns implementerad i alla processdatorsystem.<br />
För mera komplicerade reglerproblem, där systemet som skall regleras har ett mera<br />
komplicerat dynamiskt beteende, behövs dock mera invecklade reglerstrategier.<br />
En ännu enklare regulatorn är p˚a-av-regulatorn eller ON-OFF-regulatorn. I en p˚a-avregulator<br />
har styrsignalen u endast tv˚a värden: umax <strong>och</strong> umin, <strong>och</strong> värdet bestäms beroende<br />
p˚a om systemets utsignal är större eller mindre än ledvärdet, t.ex.<br />
<br />
umax om y(t) < r<br />
u(t) =<br />
(2.29)<br />
umin om y(t) > r<br />
18














