

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
u<br />
u<br />
u<br />
✲<br />
✲<br />
G1<br />
G2<br />
y1 = G1u<br />
u ✲ y = (G1 + G2)u<br />
✲ G1<br />
y2 = G2u<br />
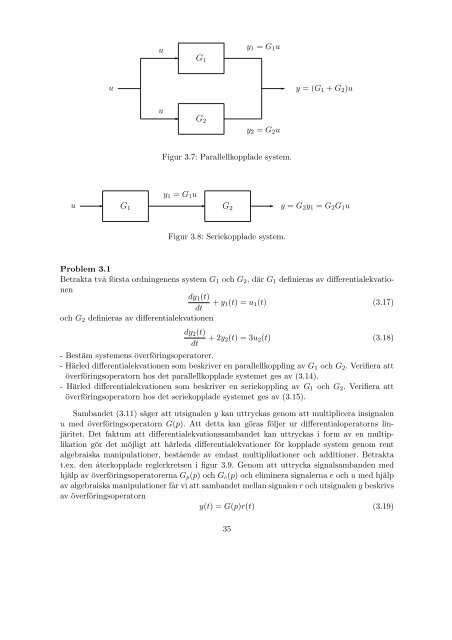
Figur 3.7: Parallellkopplade system.<br />
y1 = G1u<br />
✲ G2<br />
✲ y = G2y1 = G2G1u<br />
Figur 3.8: Seriekopplade system.<br />
Problem 3.1<br />
Betrakta tv˚a första ordningenens system G1 <strong>och</strong> G2, där G1 definieras av differentialekvationen<br />
dy1(t)<br />
dt + y1(t) = u1(t) (3.17)<br />
<strong>och</strong> G2 definieras av differentialekvationen<br />
dy2(t)<br />
dt + 2y2(t) = 3u2(t) (3.18)<br />
- Bestäm systemens överföringsoperatorer.<br />
- Härled differentialekvationen som beskriver en parallellkoppling av G1 <strong>och</strong> G2. Verifiera att<br />
överföringsoperatorn hos det parallellkopplade systemet ges av (3.14).<br />
- Härled differentialekvationen som beskriver en seriekoppling av G1 <strong>och</strong> G2. Verifiera att<br />
överföringsoperatorn hos det seriekopplade systemet ges av (3.15).<br />
Sambandet (3.11) säger att utsignalen y kan uttryckas genom att multiplicera insignalen<br />
u med överföringsoperatorn G(p). Att detta kan göras följer ur differentialoperatorns linjäritet.<br />
Det faktum att differentialekvationssambandet kan uttryckas i form av en multiplikation<br />
gör det möjligt att härleda differentialekvationer för kopplade system genom rent<br />
algebraiska manipulationer, best˚aende av endast multiplikationer <strong>och</strong> additioner. Betrakta<br />
t.ex. den ˚aterkopplade reglerkretsen i figur 3.9. Genom att uttrycka signalsambanden med<br />
hjälp av överföringsoperatorerna Gp(p) <strong>och</strong> Gc(p) <strong>och</strong> eliminera signalerna e <strong>och</strong> u med hjälp<br />
av algebraiska manipulationer f˚ar vi att sambandet mellan signalen r <strong>och</strong> utsignalen y beskrivs<br />
av överföringsoperatorn<br />
y(t) = G(p)r(t) (3.19)<br />
35














