

och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi
och reglerteknik - Åbo Akademi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
där<br />
<strong>och</strong><br />
β =<br />
<br />
1 − ζ 2 (3.40)<br />
ϕ = arccos(ζ) (3.41)<br />
Man kan visa att översvängens maximala storlek M ges av (angiven i % av statiska värdet)<br />
<strong>och</strong> tiden tM vid vilken den maximala översvängen f˚as är<br />
<br />
−ζπ<br />
M = exp × 100% (3.42)<br />
β<br />
tM = π<br />
ωnβ<br />
(3.43)<br />
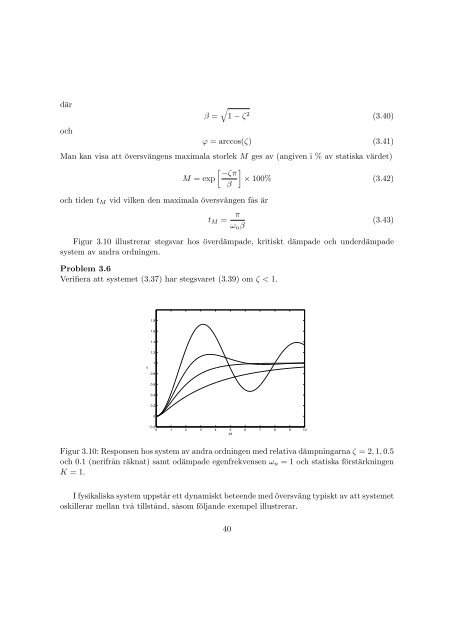
Figur 3.10 illustrerar stegsvar hos överdämpade, kritiskt dämpade <strong>och</strong> underdämpade<br />
system av andra ordningen.<br />
Problem 3.6<br />
Verifiera att systemet (3.37) har stegsvaret (3.39) om ζ < 1.<br />
y<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
0 1 2 3 4 5<br />
tid<br />
6 7 8 9 10<br />
Figur 3.10: Responsen hos system av andra ordningen med relativa dämpningarna ζ = 2, 1, 0.5<br />
<strong>och</strong> 0.1 (nerifr˚an räknat) samt odämpade egenfrekvensen ωn = 1 <strong>och</strong> statiska förstärkningen<br />
K = 1.<br />
I fysikaliska system uppst˚ar ett dynamiskt beteende med översväng typiskt av att systemet<br />
oskillerar mellan tv˚a tillst˚and, s˚asom följande exempel illustrerar.<br />
40














